TAIYUAN UNIVERSITY OF SCIENCE & TECHNOLOGY题 目: 院 (系): 专 业: 学生姓名: 学 号: 模 糊 控 制 在 倒 立 摆 中 的 仿 真 应 用 1 、倒立摆系统1
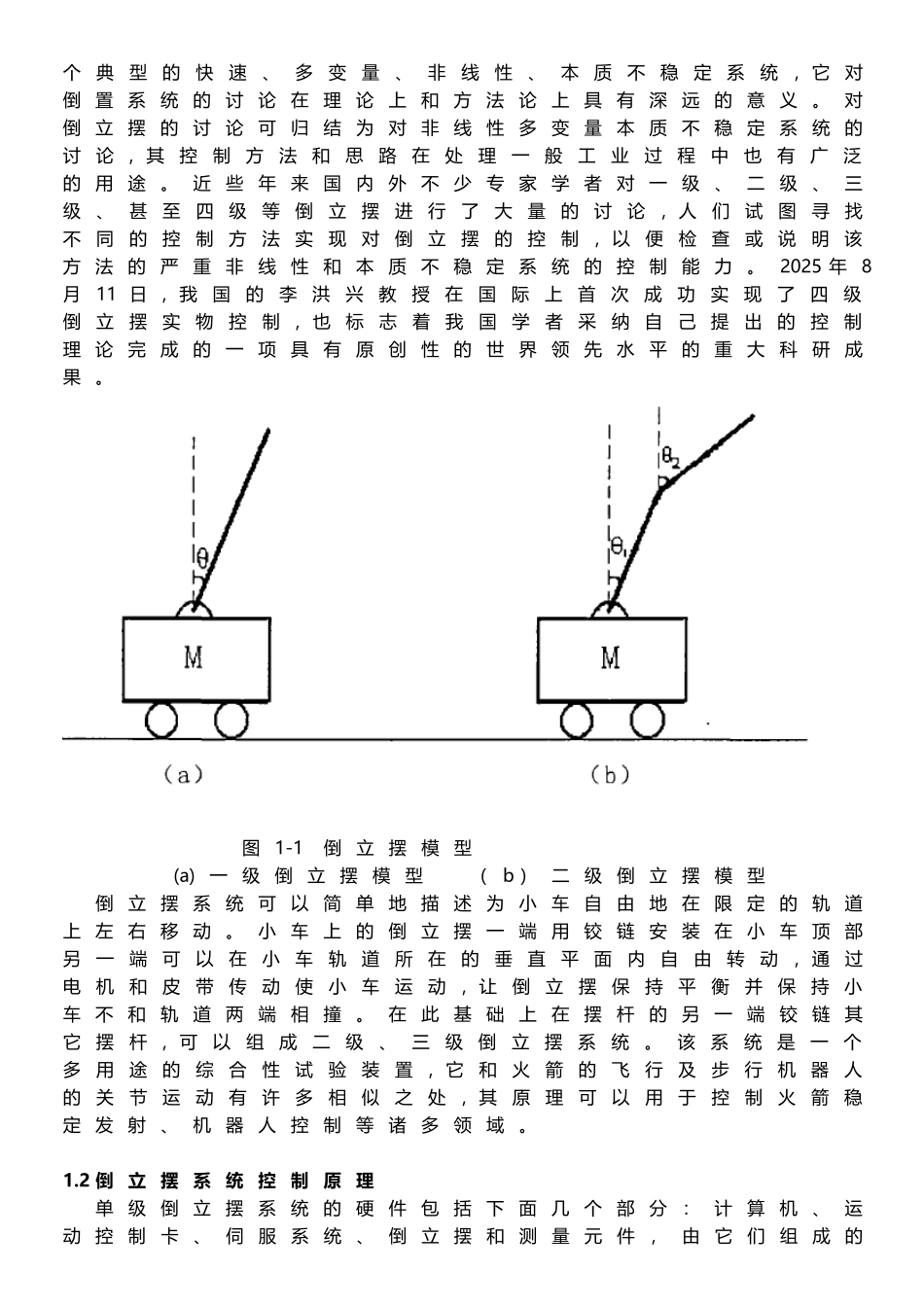
1 简介 倒立摆有许多类型, 例如图1-1 的a 和b 所示的分别是轮轨式一级倒立摆系统和二级倒立摆系统的模型
倒立摆是一个典型的快速、多变量、非线性、本质不稳定系统, 它对倒置系统的讨论在理论上和方法论上具有深远的意义
对倒立摆的讨论可归结为对非线性多变量本质不稳定系统的讨论, 其控制方法和思路在处理一般工业过程中也有广泛的用途
近些年来国内外不少专家学者对一级、二级、三级、甚至四级等倒立摆进行了大量的讨论, 人们试图寻找不同的控制方法实现对倒立摆的控制, 以便检查或说明该方法的严重非线性和本质不稳定系统的控制能力
2025 年8月11 日, 我国的李洪兴教授在国际上首次成功实现了四级倒立摆实物控制, 也标志着我国学者采纳自己提出的控制理论完成的一项具有原创性的世界领先水平的重大科研成果
图1-1 倒立摆模型 (a)一级倒立摆模型 (b )二级倒立摆模型 倒立摆系统可以简单地描述为小车自由地在限定的轨道上左右移动
小车上的倒立摆一端用铰链安装在小车顶部另一端可以在小车轨道所在的垂直平面内自由转动, 通过电机和皮带传动使小车运动, 让倒立摆保持平衡并保持小车不和轨道两端相撞
在此基础上在摆杆的另一端铰链其它摆杆, 可以组成二级、三级倒立摆系统
该系统是一个多用途的综合性试验装置, 它和火箭的飞行及步行机器人的关节运动有许多相似之处, 其原理可以用于控制火箭稳定发射、机器人控制等诸多领域
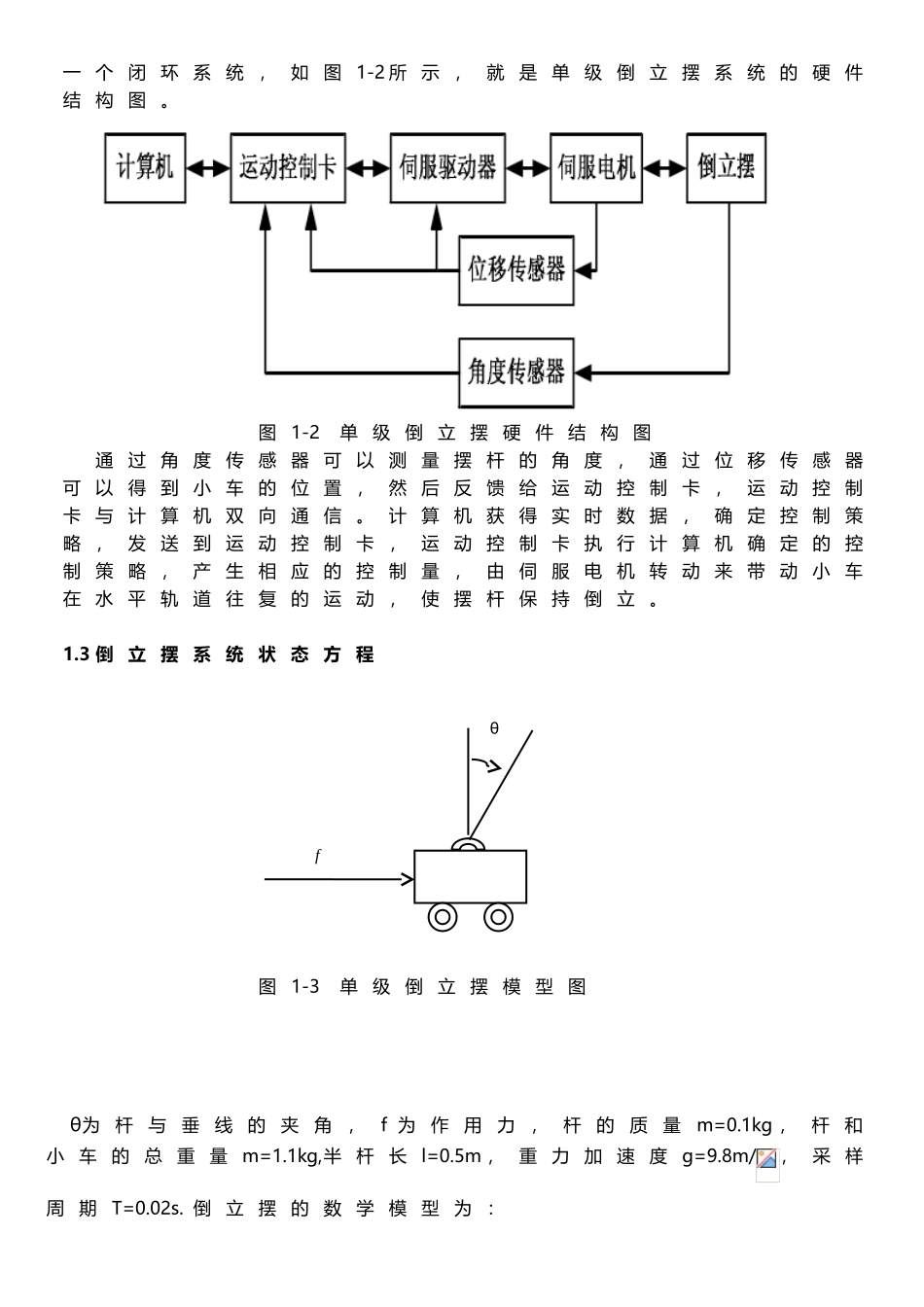
2 倒立摆系统控制原理单级倒立摆系统的硬件包括下面几个部分:计算机、运动控制卡、伺服系统、倒立摆和测量元件,由它们组成的一个闭环系统,如图1-2 所示,就是单级倒立摆系统的