基于双闭环 PID 控制的一阶倒立摆控制系统设计一、设计目的 倒立摆是一个非线性、不稳定系统,常常作为讨论比较不同控制方法的典型例子
设计一个倒立摆的控制系统,使倒立摆这样一个不稳定的被控对象通过引入适当的控制策略使之成为一个能够满足各种性能指标的稳定系统
二、设计要求 倒立摆的设计要求是使摆杆尽快地达到一个平衡位置,并且使之没有大的振荡和过大的角度和速度
当摆杆到达期望的位置后,系统能克服随机扰动而保持稳定的位置
实验参数自己选定,但要合理符合实际情况,控制方式为双PID 控制,并利用 MATLAB 进行仿真,并用 simulink 对相应的模块进行仿真
三、设计原理 倒立摆控制系统的工作原理是:由轴角编码器测得小车的位置和摆杆相对垂直方向的角度,作为系统的两个输出量被反馈至控制计算机
计算机根据一定的控制算法,计算出空置量,并转化为相应的电压信号提供给驱动电路,以驱动直流力矩电机的运动,从而通过牵引机构带动小车的移动来控制摆杆和保持平衡
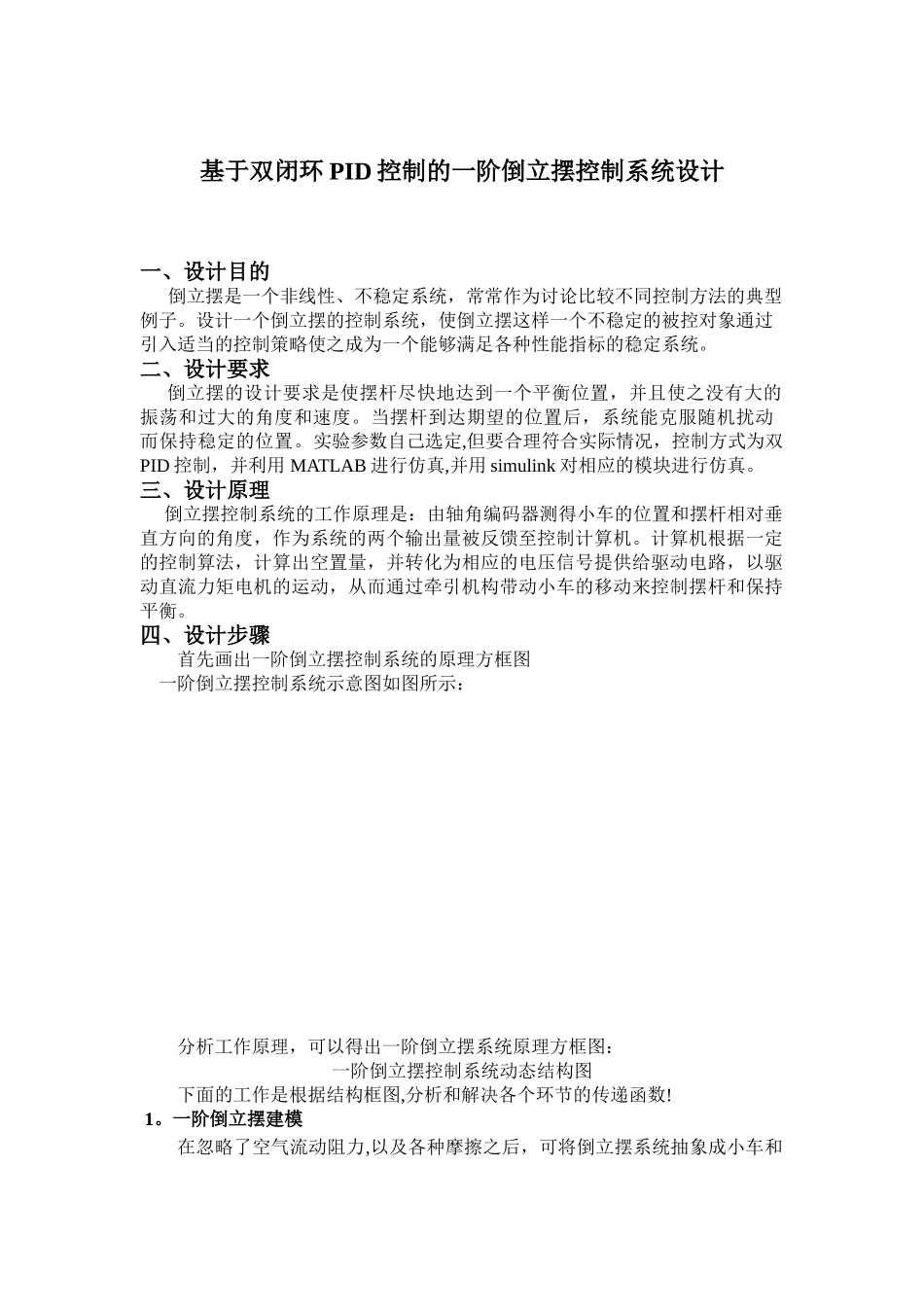
四、设计步骤首先画出一阶倒立摆控制系统的原理方框图 一阶倒立摆控制系统示意图如图所示:分析工作原理,可以得出一阶倒立摆系统原理方框图:一阶倒立摆控制系统动态结构图下面的工作是根据结构框图,分析和解决各个环节的传递函数
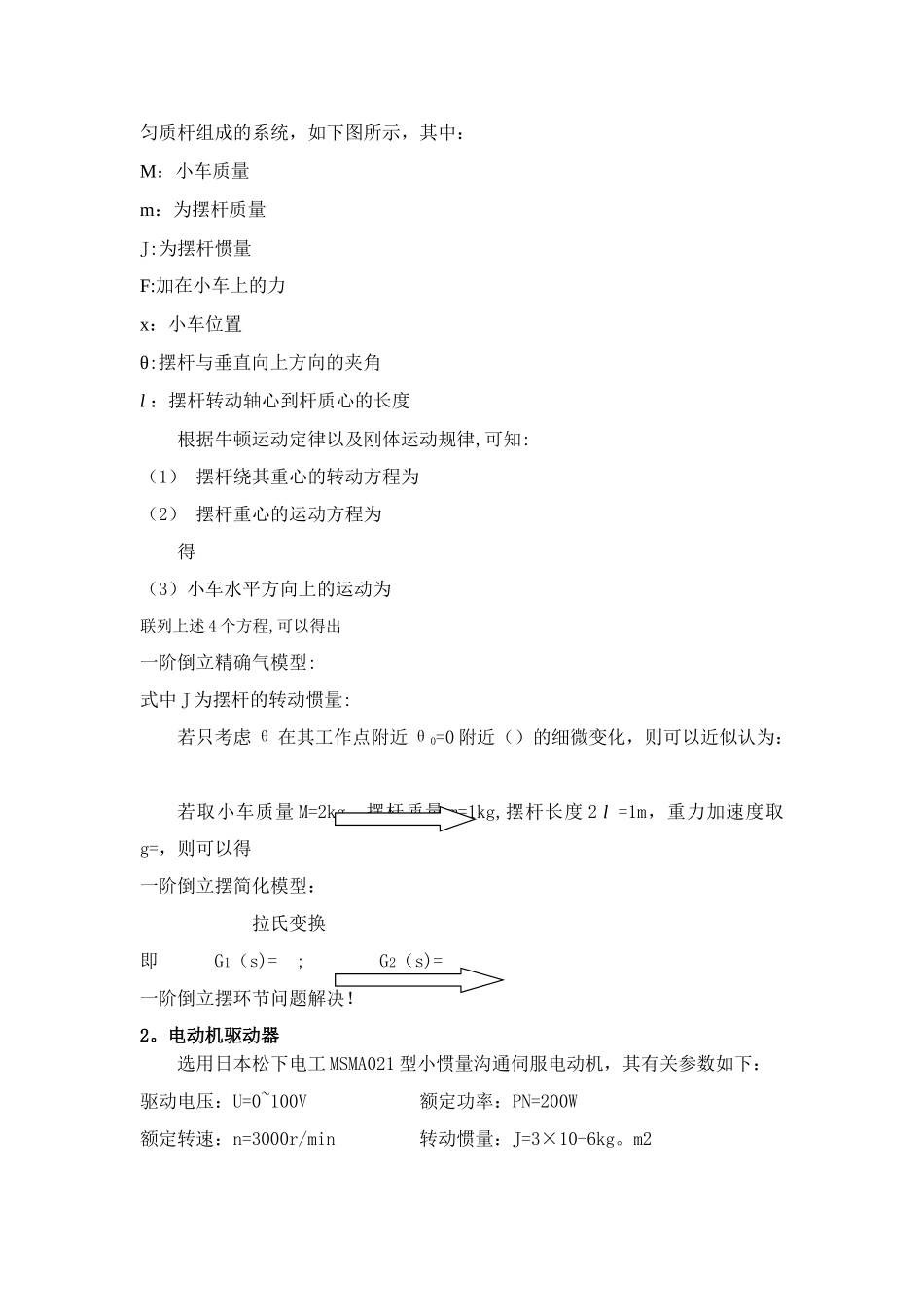
一阶倒立摆建模在忽略了空气流动阻力,以及各种摩擦之后,可将倒立摆系统抽象成小车和匀质杆组成的系统,如下图所示,其中: M:小车质量 m:为摆杆质量 J:为摆杆惯量 F:加在小车上的力 x:小车位置 θ:摆杆与垂直向上方向的夹角 l :摆杆转动轴心到杆质心的长度 根据牛顿运动定律以及刚体运动规律,可知:(1) 摆杆绕其重心的转动方程为(2) 摆杆重心的运动方程为得(3)小车水平方向上的运动为联列上述 4 个方程,可以得出一阶倒立精确气模型:式中 J 为摆杆的转动惯量:若只考虑 θ 在其工作点附近 θ0=0 附近()的