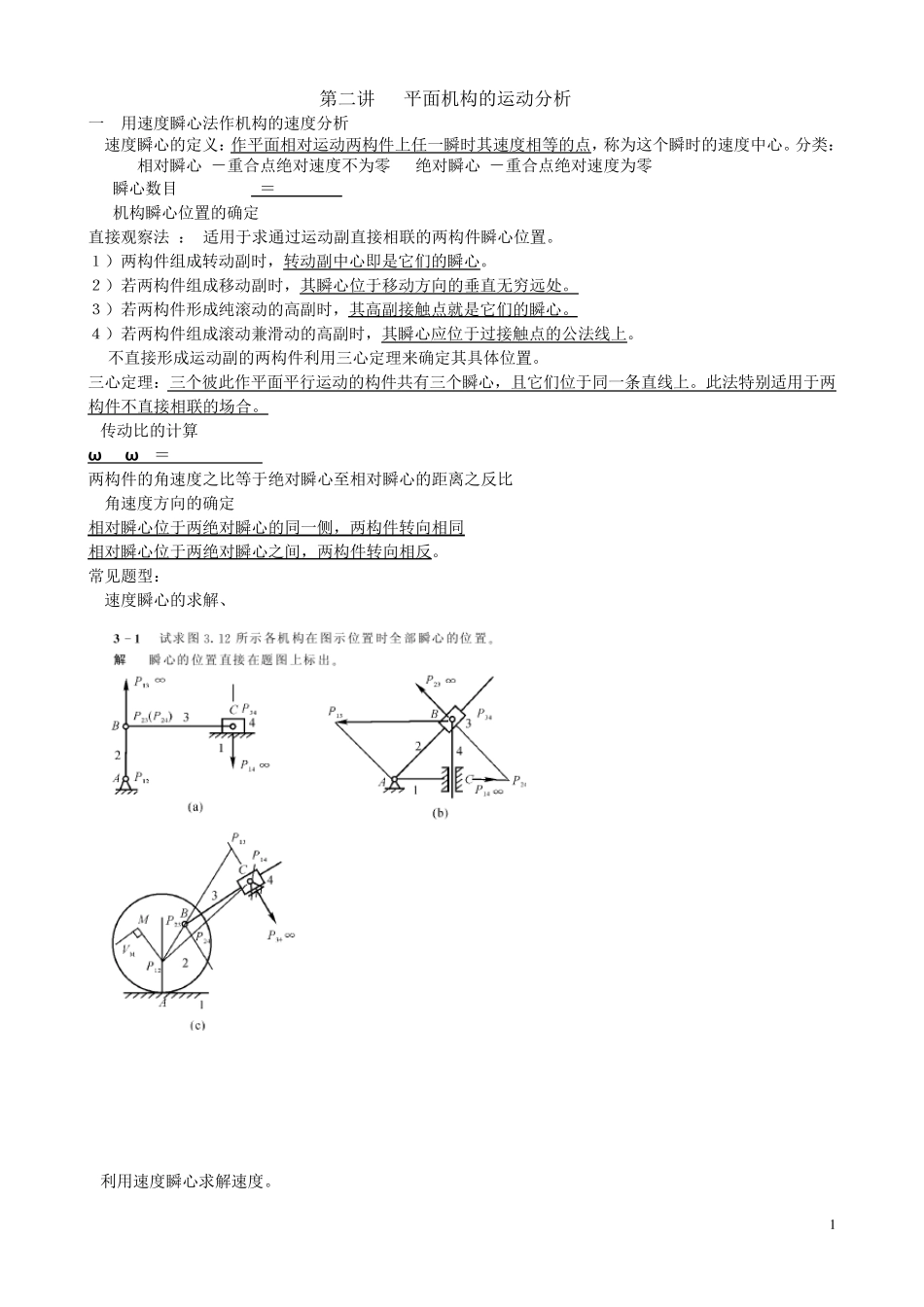
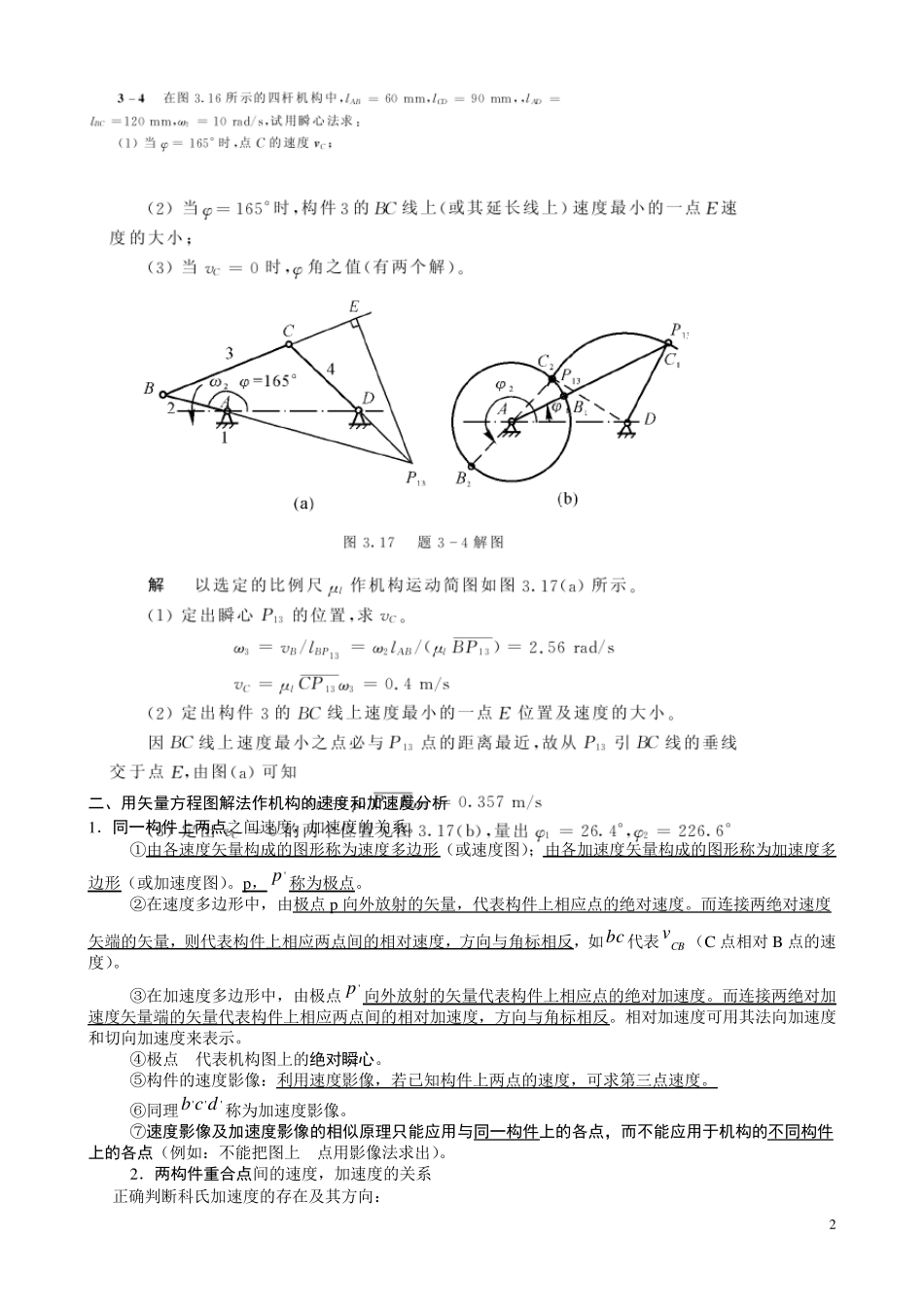
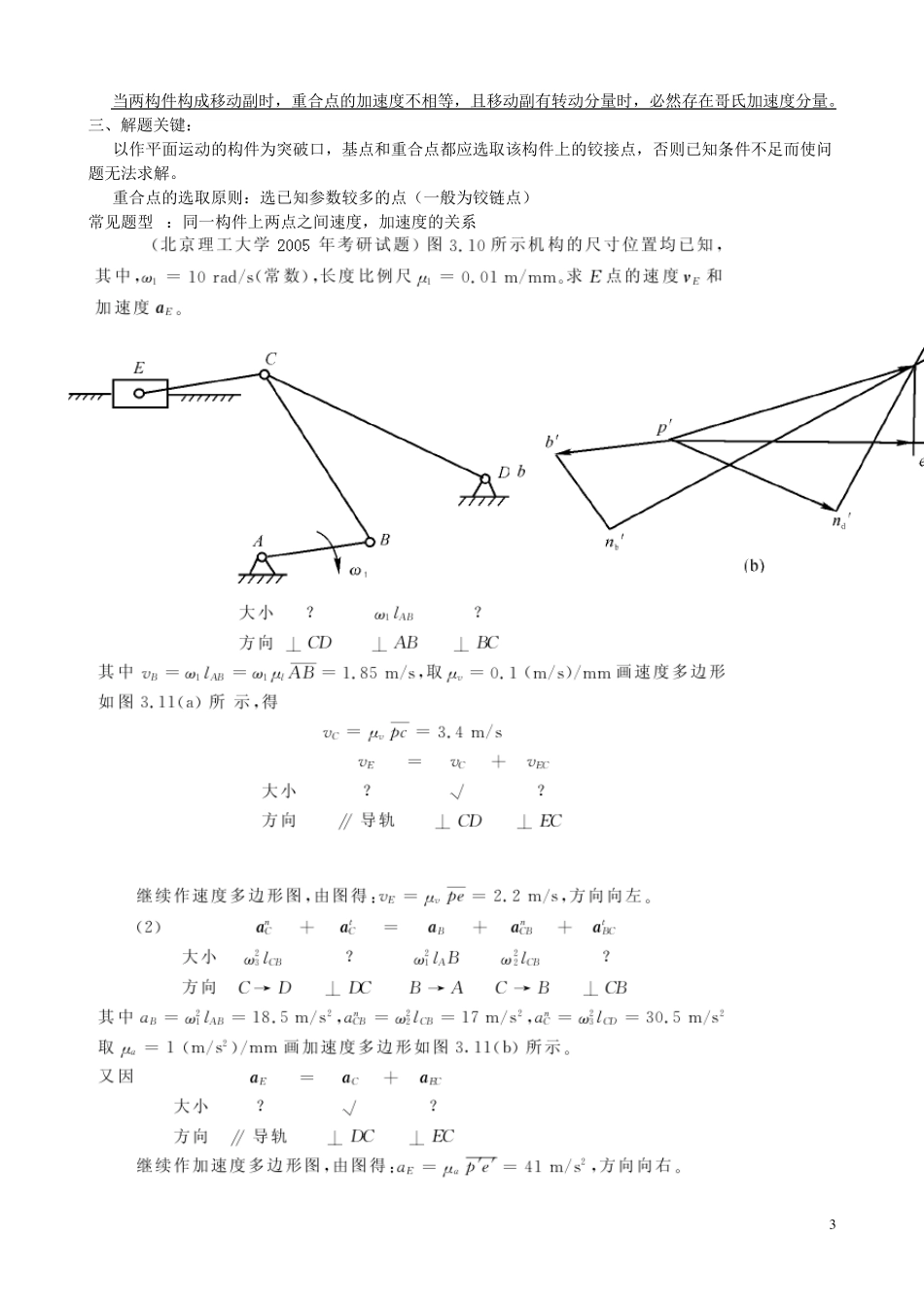
1 第二讲 平面机构的运动分析 一 用速度瞬心法作机构的速度分析 1 速度瞬心的定义:作平面相对运动两构件上任一瞬时其速度相等的点,称为这个瞬时的速度中心。分类:相对瞬心 -重合点绝对速度不为零 绝对瞬心 -重合点绝对速度为零 2 瞬心数目 K=N(N-1)/2 3 机构瞬心位置的确定 直接观察法 : 适用于求通过运动副直接相联的两构件瞬心位置。 1)两构件组成转动副时,转动副中心即是它们的瞬心。 2)若两构件组成移动副时,其瞬心位于移动方向的垂直无穷远处。 3)若两构件形成纯滚动的高副时,其高副接触点就是它们的瞬心。 4)若两构件组成滚动兼滑动的高副时,其瞬心应位于过接触点的公法线上。 不直接形成运动副的两构件利用三心定理来确定其具体位置。 三心定理:三个彼此作平面平行运动的构件共有三个瞬心,且它们位于同一条直线上。此法特别适用于两构件不直接相联的场合。 4传动比的计算 ωi /ωj =P1jPij / P1iPij 两构件的角速度之比等于绝对瞬心至相对瞬心的距离之反比 5.角速度方向的确定 相对瞬心位于两绝对瞬心的同一侧,两构件转向相同 相对瞬心位于两绝对瞬心之间,两构件转向相反。 常见题型: 1.速度瞬心的求解、 2利用速度瞬心求解速度。 2 二、用矢量方程图解法作机构的速度和加速度分析 1.同一构件上两点之间速度,加速度的关系。 ①由各速度矢量构成的图形称为速度多边形(或速度图);由各加速度矢量构成的图形称为加速度多边形(或加速度图)。p,'p 称为极点。 ②在速度多边形中,由极点 p向外放射的矢量,代表构件上相应点的绝对速度。而连接两绝对速度矢端的矢量,则代表构件上相应两点间的相对速度,方向与角标相反,如bc 代表CBv(C 点相对 B 点的速度)。 ③在加速度多边形中,由极点'p 向外放射的矢量代表构件上相应点的绝对加速度。而连接两绝对加速度矢量端的矢量代表构件上相应两点间的相对加速度,方向与角标相反。相对加速度可用其法向加速度和切向加速度来表示。 ④极点 p代表机构图上的绝对瞬心。 ⑤构件的速度影像:利用速度影像,若已知构件上两点的速度,可求第三点速度。 ⑥同理''' dcb称为加速度影像。 ⑦速度影像及加速度影像的相似原理只能应用与同一构件上的各点,而不能应用于机构的不同构件上的各点(例如:不能把图上 E点用影像法求出)。 2.两构件重合点间的速度,加速度的关系 正确判断科氏加速度的存在及其方向: 3 当...