文案大全GPS 相对定位原理1
相对定位原理概述不论是测码伪距绝对定位还是测相伪距绝对定位,由于卫星星历误差、接收机钟与卫星钟同步差、大气折射误差等各种误差的影响,导致其定位精度较低
虽然这些误差已作了一定的处理,但是实践证明绝对定位的精度仍不能满足精密定位测量的需要
为了进一步消除或减弱各种误差的影响,提高定位精度,一般采用相对定位法
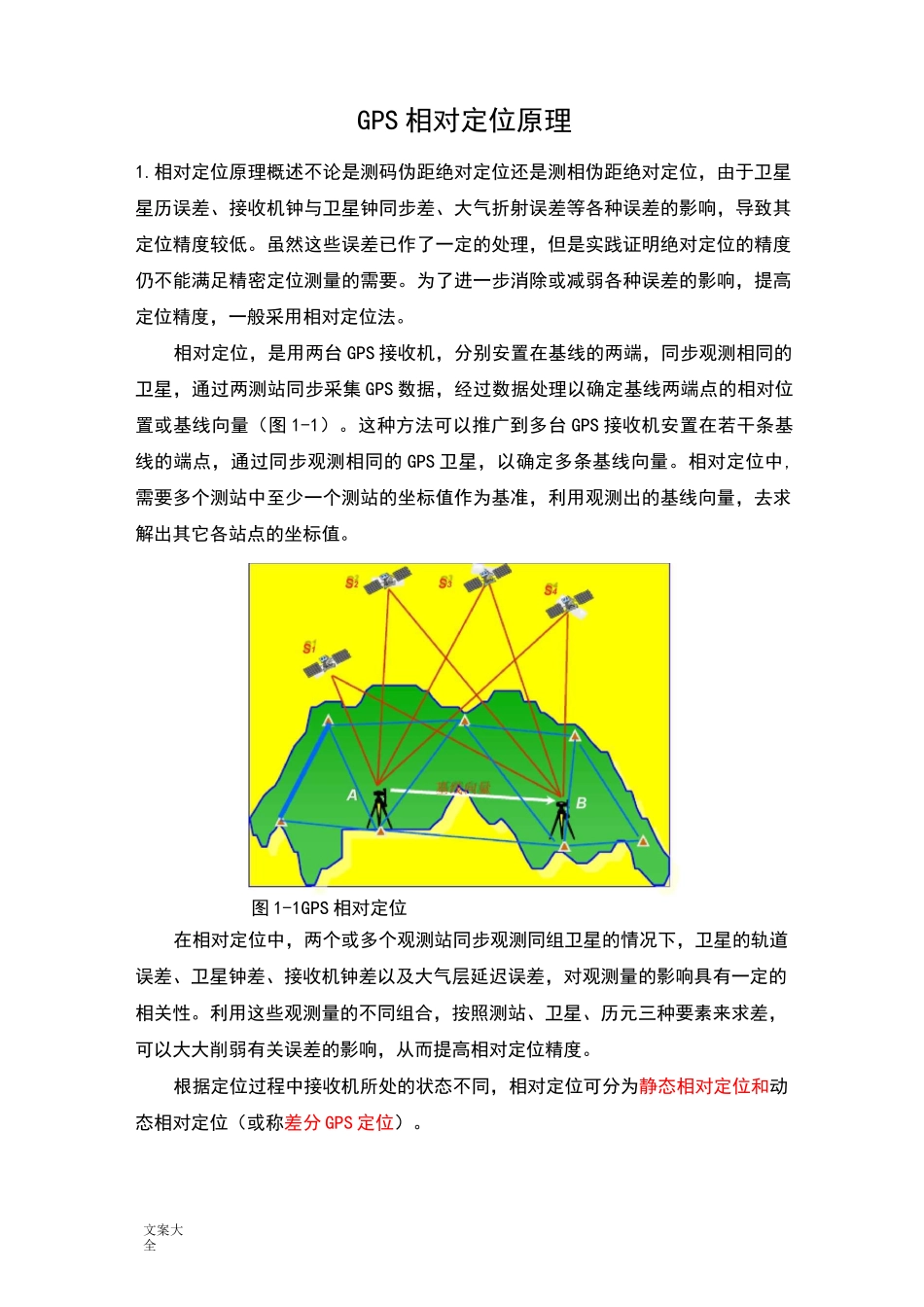
相对定位,是用两台 GPS 接收机,分别安置在基线的两端,同步观测相同的卫星,通过两测站同步采集 GPS 数据,经过数据处理以确定基线两端点的相对位置或基线向量(图 1-1)
这种方法可以推广到多台 GPS 接收机安置在若干条基线的端点,通过同步观测相同的 GPS 卫星,以确定多条基线向量
相对定位中,需要多个测站中至少一个测站的坐标值作为基准,利用观测出的基线向量,去求解出其它各站点的坐标值
图 1-1GPS 相对定位在相对定位中,两个或多个观测站同步观测同组卫星的情况下,卫星的轨道误差、卫星钟差、接收机钟差以及大气层延迟误差,对观测量的影响具有一定的相关性
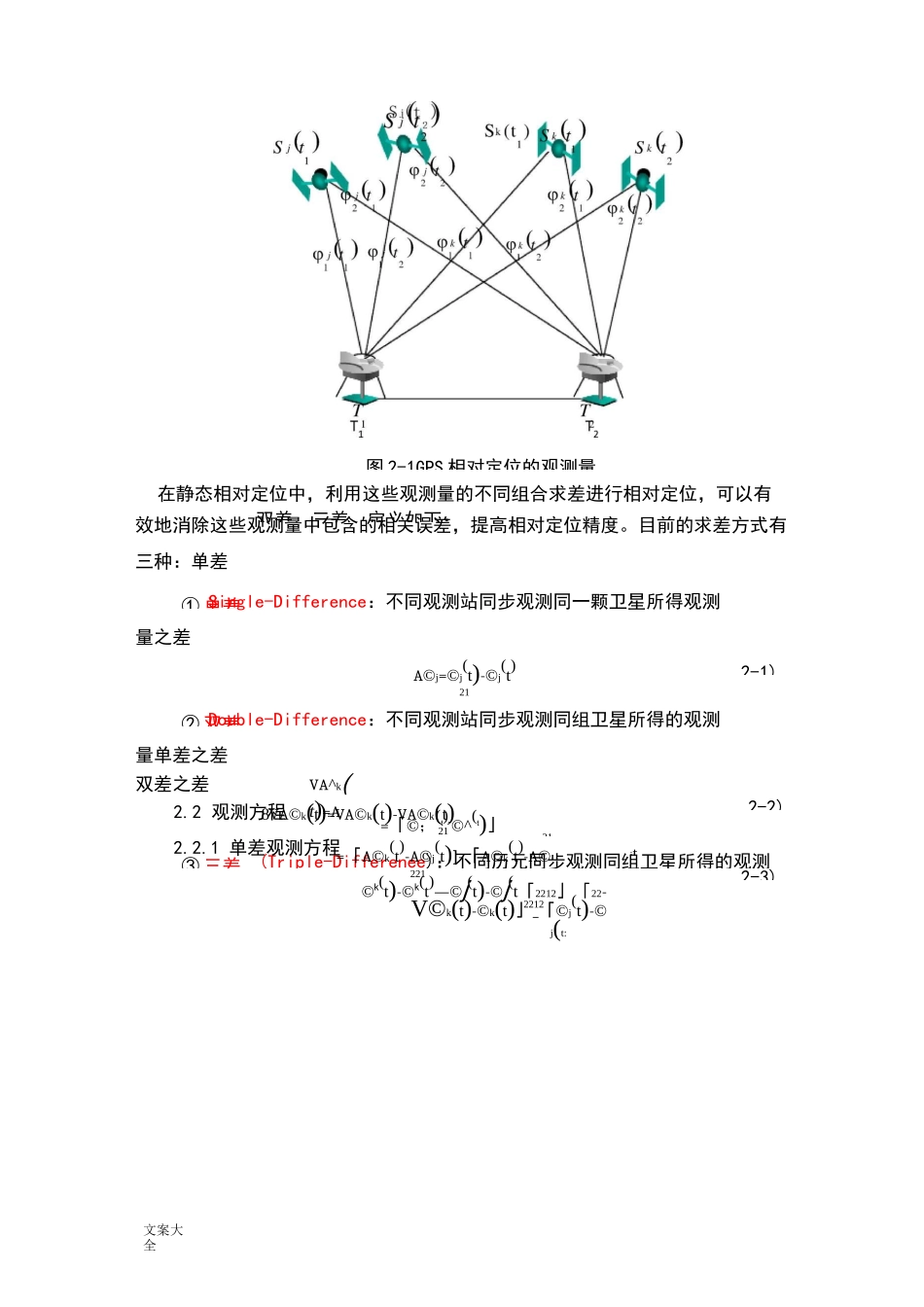
利用这些观测量的不同组合,按照测站、卫星、历元三种要素来求差,可以大大削弱有关误差的影响,从而提高相对定位精度
根据定位过程中接收机所处的状态不同,相对定位可分为静态相对定位和动态相对定位(或称差分 GPS 定位)
静态相对定位原理设置在基线两端点的接收机相对于周围的参照物固定不动,通过连续观测获得充分的多余观测数据,解算基线向量,称为静态相对定位
静态相对定位,一般均采用测相伪距观测值作为基本观测量
测相伪距静态相对定位是当前 GPS 定位中精度最高的一种方法
在测相伪距观测的数据处理中,为了可靠的确定载波相位的整周未知数,静态相对定位一般需要较长的观测时间(1
0h),称为经典静态相对定位
可见,经典静态相对定位方法的测量效率较低,如何缩短观测时间,以提高作