步进电动机是一种将电脉冲信号转换成角位移或线位移的机电元件
步进电动机的输入量是脉冲序列,输出量则为相应的增量位移或步进运动
正常运动情况下,它每转一周具有固定的步数;做连续步进运动时,其旋转转速与输入脉冲的频率保持严格的对应关系,不受电压波动和负载变化的影响
由于步进电动机能直接接受数字量的控制,所以特别适宜采用微机进行控制
步进电动机的种类 目前常用的有三种步进电动机: (1)反应式步进电动机(VR)
反应式步进电动机结构简单,生产成本低,步距角小;但动态性能差
(2)永磁式步进电动机(PM)
永磁式步进电动机出力大,动态性能好;但步距角大
(3)混合式步进电动机(HB)
混合式步进电动机综合了反应式、永磁式步进电动机两者的优点,它的步距角小,出力大,动态性能好,是目前性能最高的步进电动机
它有时也称作永磁感应子式步进电动机
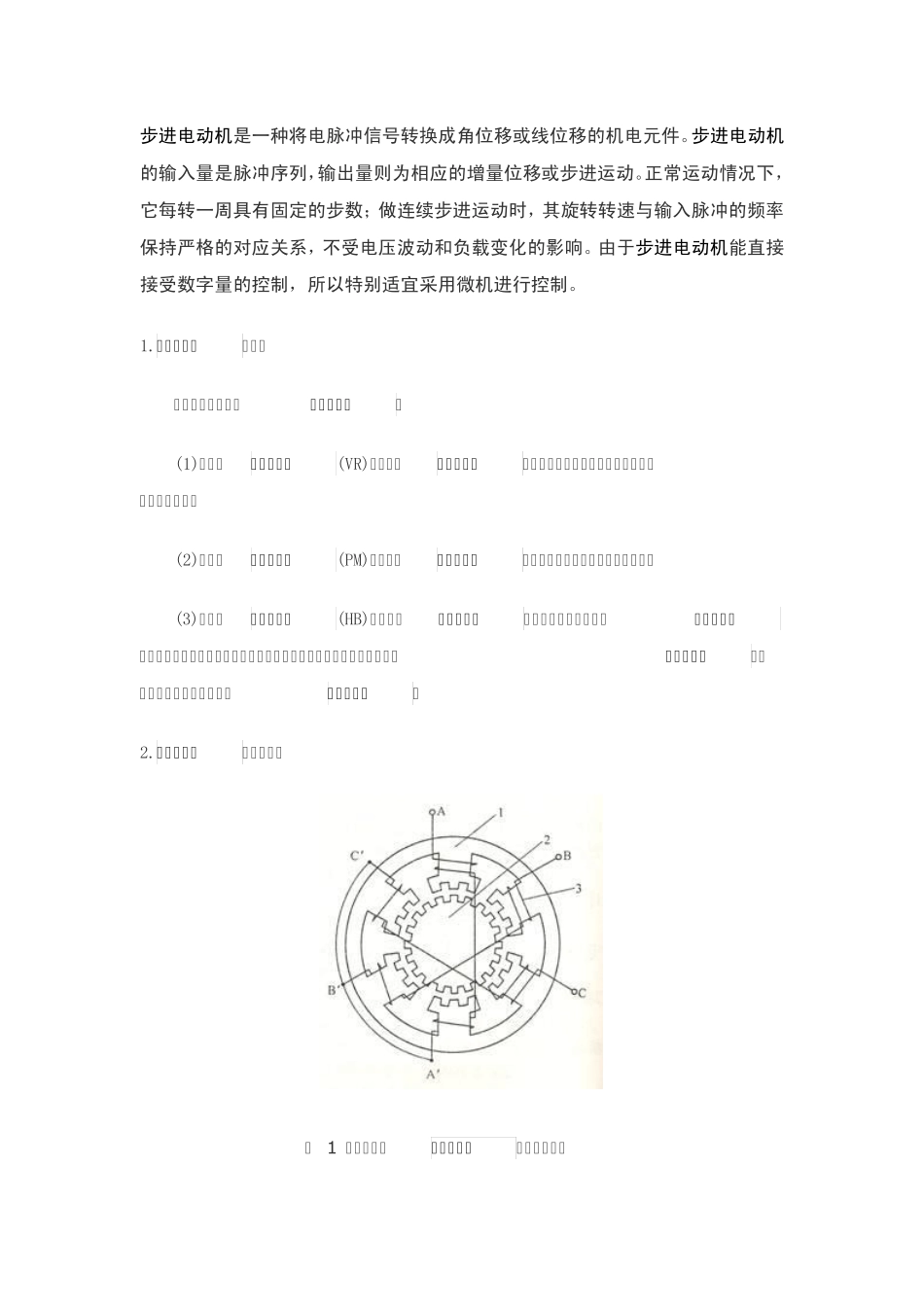
步进电动机的工作原理 图 1 三相反应式步进电动机的结构示意图 1——定子 2——转子 3——定子绕组{{分页}} 图 1 是最常见的三相反应式步进电动机的剖面示意图
电机的定子上有六个均布的磁极,其夹角是60º
各磁极上套有线圈,按图1 连成A、 B、 C 三相绕组
转子上均布40 个小齿
所以每个齿的齿距为θE=360º/40=9º, 而定子每个磁极的极弧上也有5 个小齿,且定子和转子的齿距和齿宽均相同
由于定子和转子的小齿数目分别是30 和 40,其比值是一分数,这就产生了所谓的齿错位的情况
若以A 相磁极小齿和转子的小齿对齐,如图1,那么B 相和C 相磁极的齿就会分别和转子齿相错三分之一的齿距,即3º
因此,B、 C 极下的磁阻比A 磁极下的磁阻大
若给B 相通电,B 相绕组产生定子磁场,其磁力线穿越B 相磁极,并力图按磁阻最小的路径闭合,这就使转子受到反应转矩(磁阻转矩)的作用而转动,直到B 磁极上的齿与转子齿对齐,恰好转