水平度测量传感器 滕琳雅 0 9 1 2 0 3 0 4 0 7 一 1
系统中运用的传感器:重力传感器
加速度(重力)传感器测量原理: I
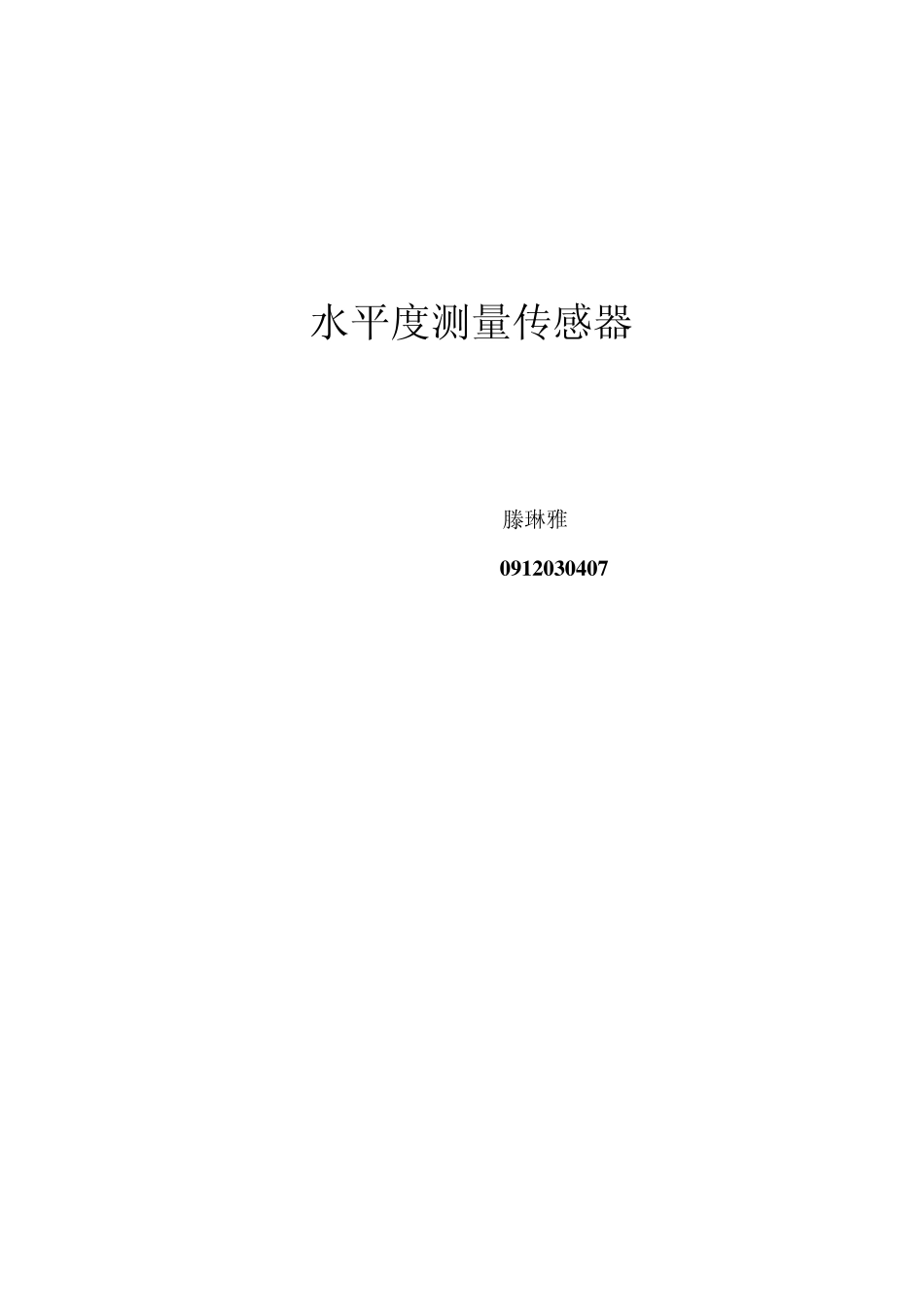
工作原理: 电容式传感器结构如图1所示,图(a)为水平放置,图(b)为实用的加速度传感器的等效电路
加速度传感器将两块质量块放在一个横梁上,横梁与腔体的上下外壳组成两个电容,水平放置时由于重力作用,则感应的信号有差,传感器输出有信号
垂直放置时,两个质量块都处于在腔体中央,两个电容的容值相同,感应信号相同,传感器输出为0
当放置的倾斜角不同,传感器的输出信号大小也不同,因此,加速度传感器可用于平面的倾斜角测量
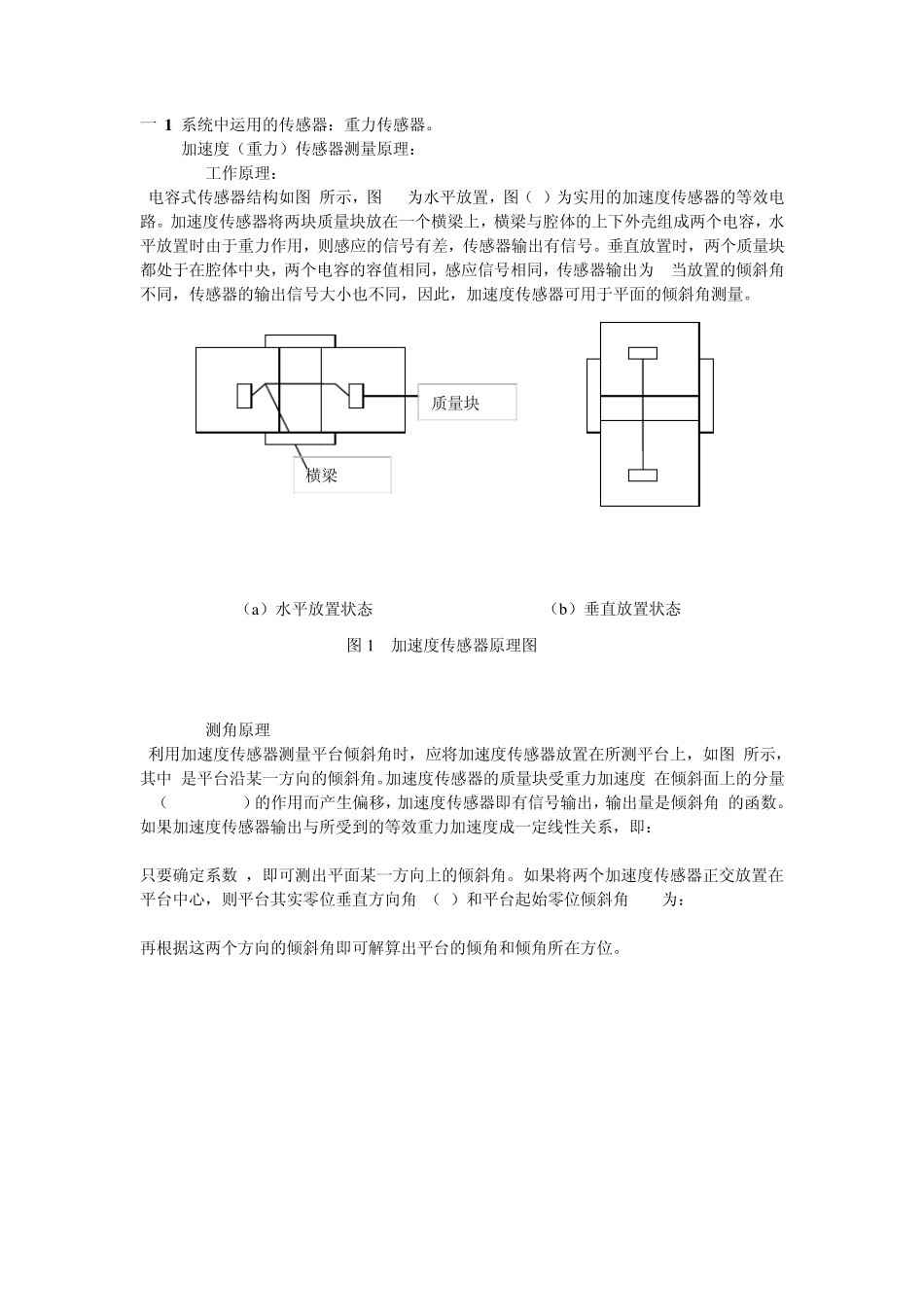
测角原理 利用加速度传感器测量平台倾斜角时,应将加速度传感器放置在所测平台上,如图2所示,其中y是平台沿某一方向的倾斜角
加速度传感器的质量块受重力加速度g在倾斜面上的分量g1(g1=g*sinr)的作用而产生偏移,加速度传感器即有信号输出,输出量是倾斜角y的函数
如果加速度传感器输出与所受到的等效重力加速度成一定线性关系,即: V=k*g*sinr 只要确定系数k,即可测出平面某一方向上的倾斜角
如果将两个加速度传感器正交放置在平台中心,则平台其实零位垂直方向角y(x)和平台起始零位倾斜角y(y)为: y(x)=1/sin(Vx/k*g) y(y)=1/sin(Vy/k*g) 再根据这两个方向的倾斜角即可解算出平台的倾角和倾角所在方位
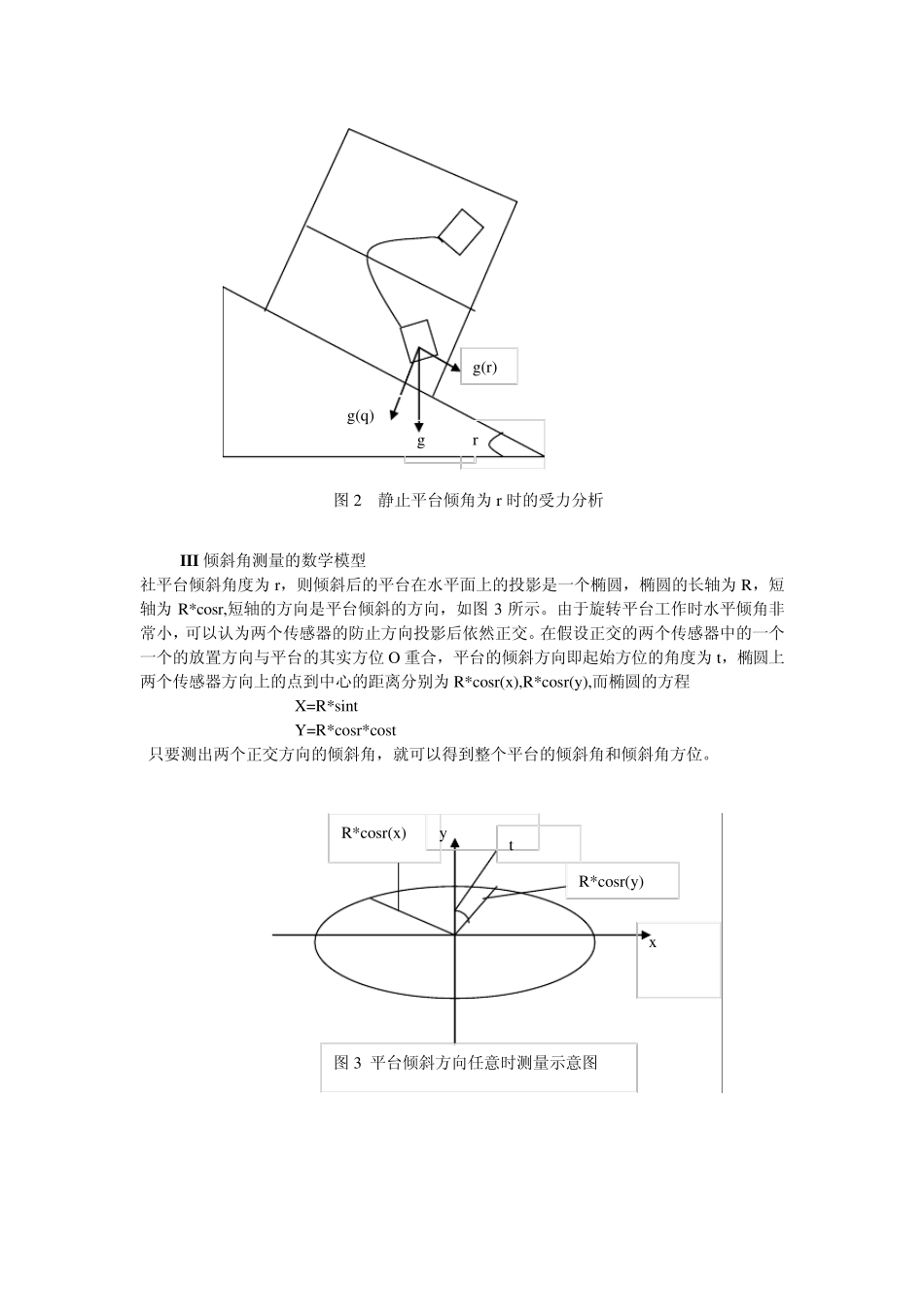
横梁 质量块 (a)水平放置状态 (b)垂直放置状态 图 1 加速度传感器原理图 III 倾斜角测量的数学模型 社平台倾斜角度为r,则倾斜后的平台在水平面上的投影是一个椭圆,椭圆的长轴为R,短轴为R*cosr,短轴的方向是平台倾斜的方向,如图3 所示
由于旋转平台工作时水平倾角非常小,可以认为两个传感器的防止方向投影后依然正交
在假设正交的两个传感器中的一个一个的放置方向与平台的