影像的分类可分为监督与非监督分类
监督分类器根据其原理有基于传统统计分析的、基于神经网络的、基于模式识别的等
本专题以 ENVI 的监督与非监督分类的实际操作为例,介绍这两种分类方法
有以下内容组成: 非监督分类 监督分类 分类后处理 非监督分类 非监督分类:也称为聚类分析或点群分类
在多光谱图像中搜寻、定义其自然相似光谱集群的过程
它不必对影像地物获取先验知识,仅依靠影像上不同类地物光谱(或纹理) 信息进行特征提取,再统计特征的差别来达到分类的目的,最后对已分出的各个类别的实际属性进行确认
目前比较常见也较为成熟的是 ISODATA、K-Mean和链状方法等
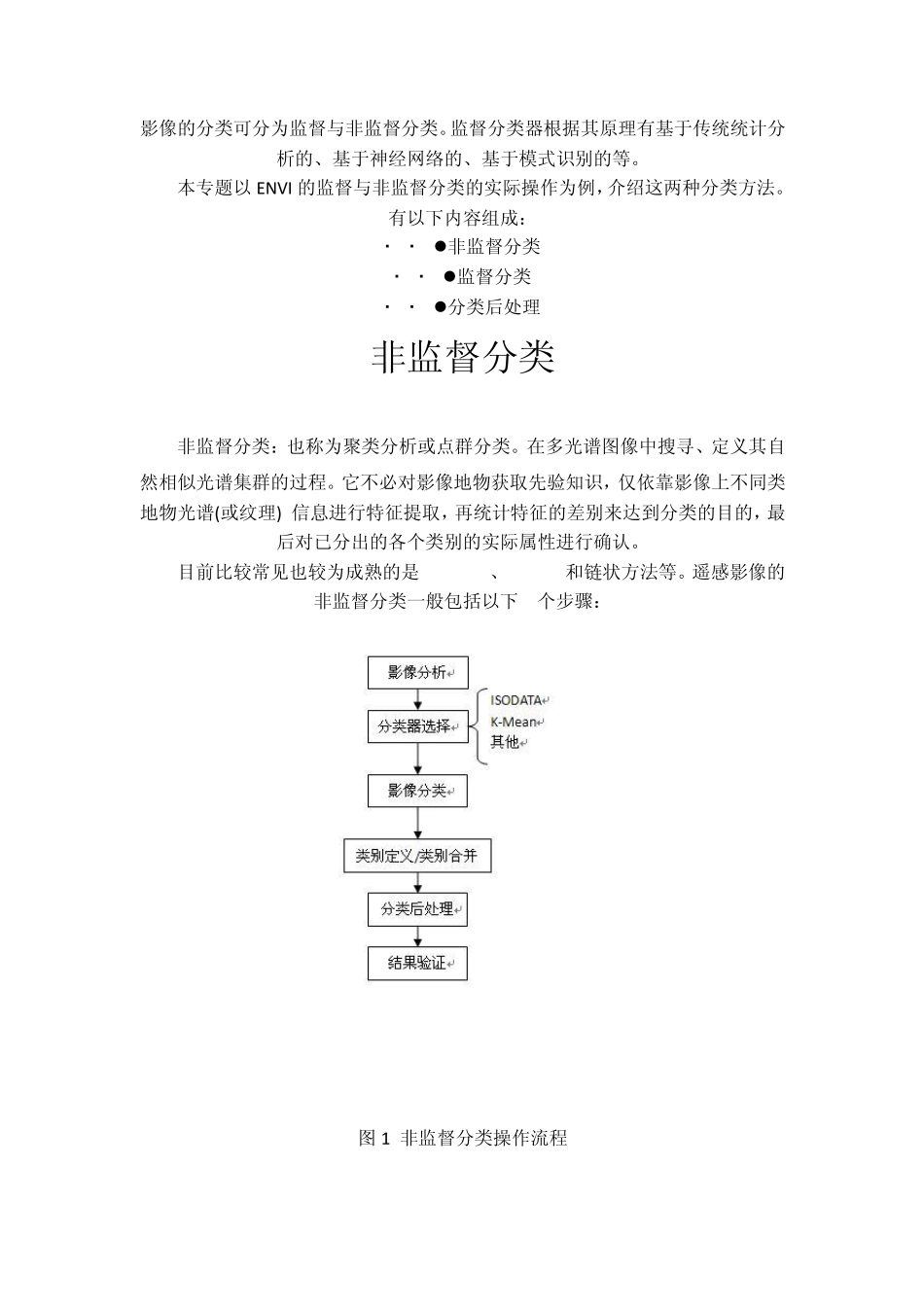
遥感影像的非监督分类一般包括以下 6个步骤: 图 1 非监督分类操作流程 1、影像分析 大体上判断主要地物的类别数量
一般监督分类设置分类数目比最终分类数量要多 2-3 倍为宜,这样有助于提高分类精度
本案例的数据源为 ENVI 自带的 Landsat tm5 数据 Can_tmr
img,类别分为:林地、草地/灌木、耕地、裸地、沙地、其他六类
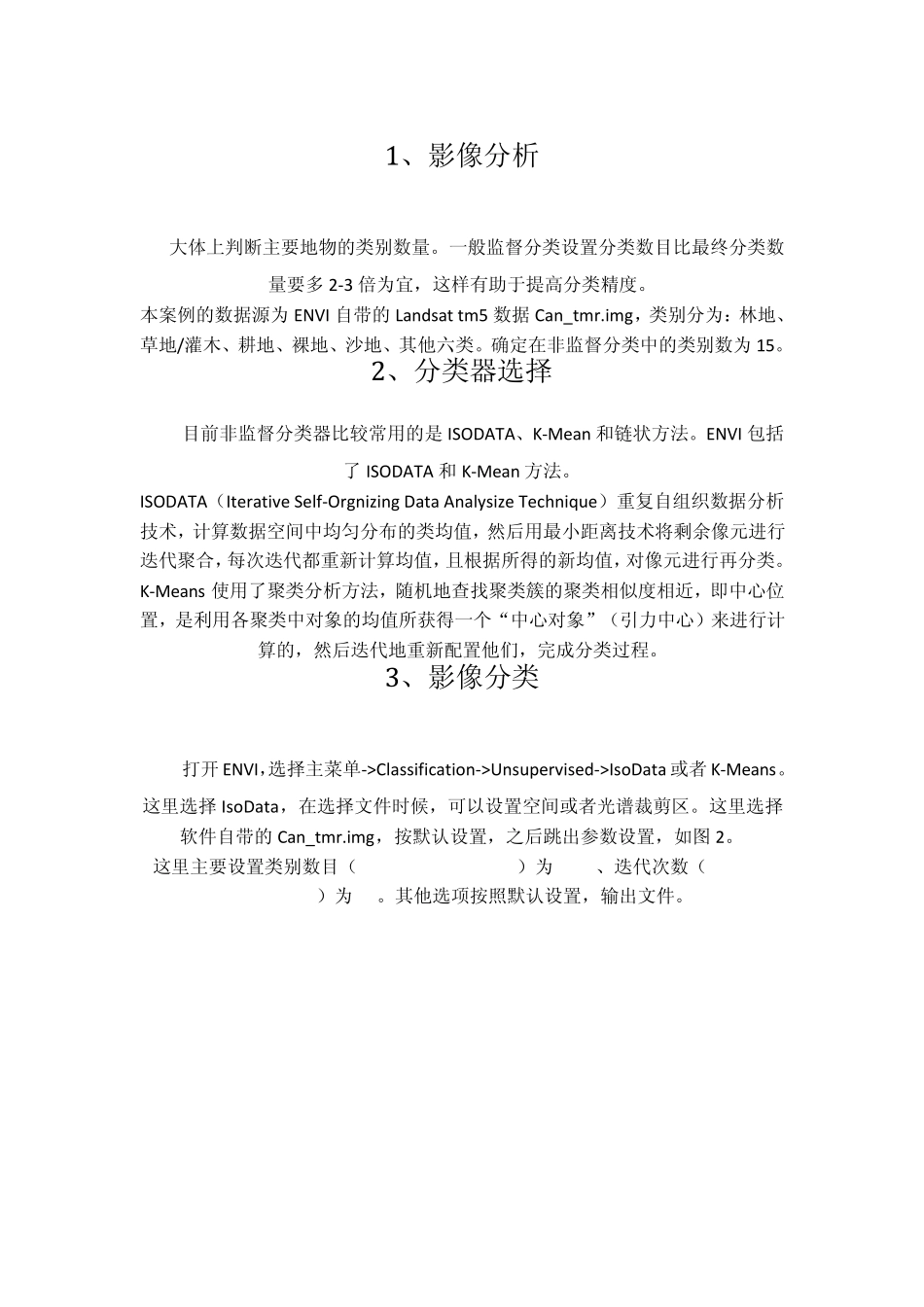
确定在非监督分类中的类别数为 15
2、分类器选择 目前非监督分类器比较常用的是 ISODATA、K-Mean 和链状方法
ENVI 包括了 ISODATA 和 K-Mean 方法
ISODATA(Iterative Self-Orgnizing Data Analysize Technique)重复自组织数据分析技术,计算数据空间中均匀分布的类均值,然后用最小距离技术将剩余像元进行迭代聚合,每次迭代都重新计算均值,且根据所得的新均值,对像元进行再分类
K-Means 使用了聚类分析方法,随机地查找聚类簇的聚类相似度相近,即中心位置,是利用各聚类中对象的均值所获得一个“中心对象”(引力中心)来进行计算的,然后迭代地重新配置他们,