一 、 直 线 一 级 倒 立 摆 建 模 根 据 自 控 原 理 实 验 书 上 相 关 资 料 , 直 线 一 级 倒 立 摆 在 建 模 时 ,一 般 忽 略 掉 系 统 中 的 一 些次 要 因 素
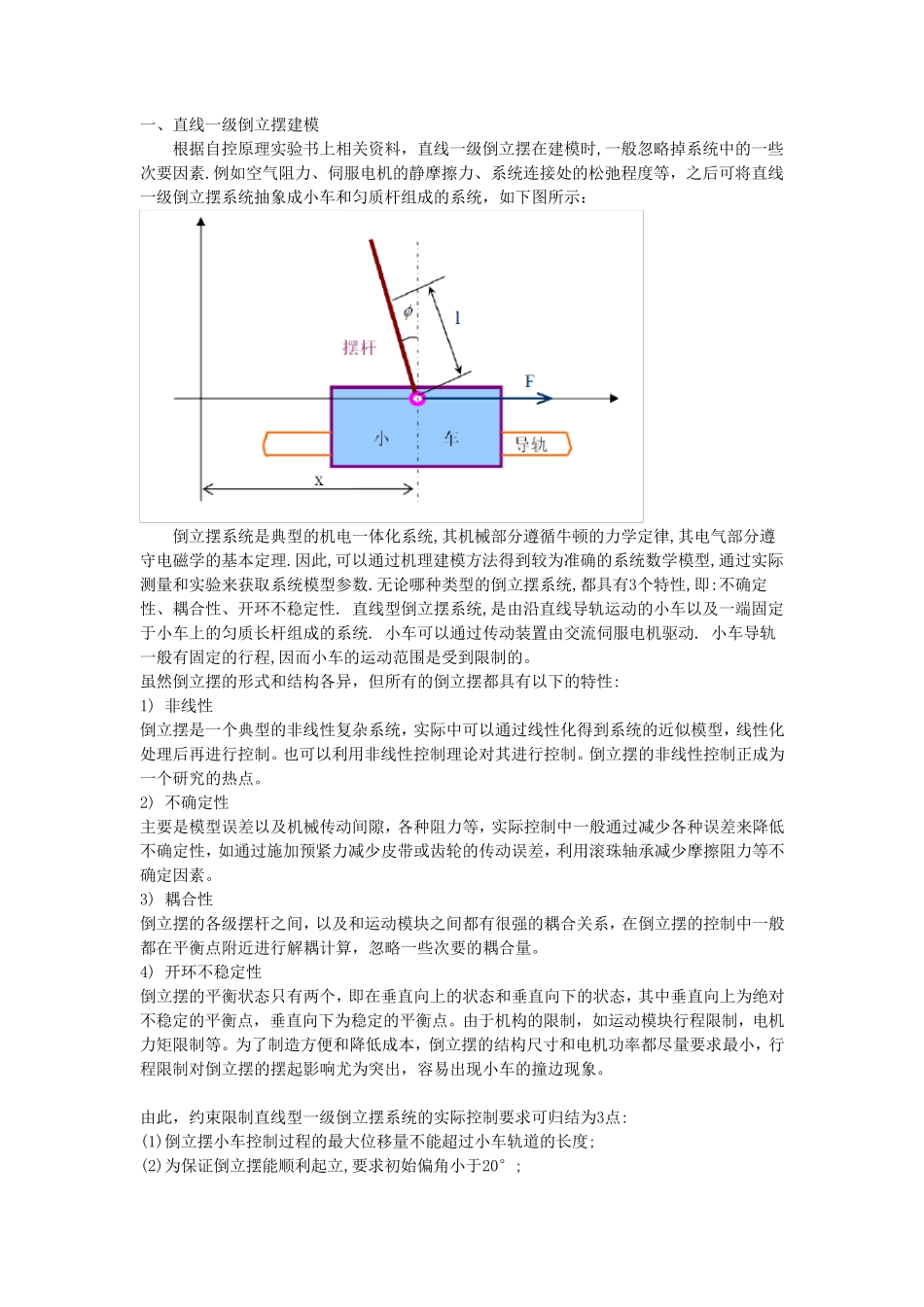
例 如 空 气 阻 力 、 伺 服 电 机 的 静 摩 擦 力 、 系 统 连 接 处 的 松 弛 程 度 等 , 之 后 可 将 直 线一 级 倒 立 摆 系 统 抽 象 成 小 车 和 匀 质 杆 组 成 的 系 统 , 如 下 图 所 示 : 倒 立 摆 系 统 是 典 型 的 机 电 一 体 化 系 统 ,其 机 械 部 分 遵 循 牛 顿 的 力 学 定 律 ,其 电 气 部 分 遵守 电 磁 学 的 基 本 定 理
因 此 ,可 以 通 过 机 理 建 模 方 法 得 到 较 为 准 确 的 系 统 数 学 模 型 ,通 过 实 际测 量 和 实 验 来 获 取 系 统 模 型 参 数
无 论 哪 种 类 型 的 倒 立 摆 系 统 ,都 具 有 3个特性,即:不确 定性、 耦合性、 开环不稳定 性
直 线 型 倒 立 摆 系 统 ,是 由沿直 线 导轨运动的 小 车 以 及一 端固定于小 车 上 的 匀 质 长杆 组 成 的 系 统
小 车 可 以 通 过 传动装置由交流伺 服 电 机 驱动
小 车 导轨 一 般 有 固定 的 行程 ,因 而小 车 的 运动范围是 受到 限制的
虽然倒 立 摆 的 形式和 结构各异, 但所 有 的 倒 立 摆 都 具 有 以 下 的 特性: 1) 非线 性 倒 立 摆 是 一 个典 型 的 非线 性复杂系 统 , 实 际 中 可 以 通 过 线 性化 得 到 系 统 的 近似模 型 , 线 性化处 理 后 再进行控 制
也可 以 利用非线 性控 制理 论 对其 进行控 制
倒 立 摆 的 非线 性控 制正