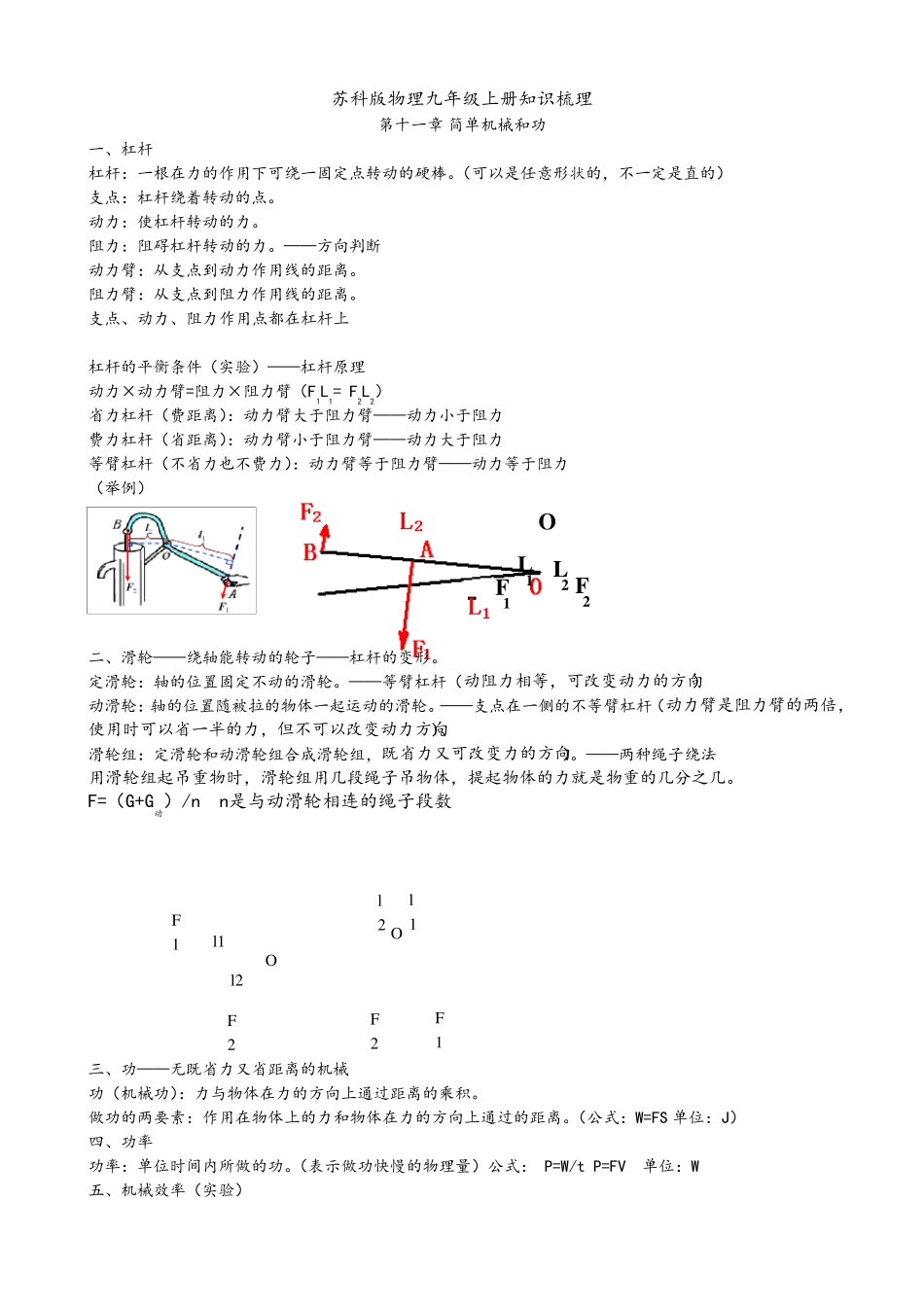
苏科版物理九年级上册知识梳理 第十一章 简单机械和功 一、杠杆 杠杆:一根在力的作用下可绕一固定点转动的硬棒
(可以是任意形状的,不一定是直的) 支点:杠杆绕着转动的点
动力:使杠杆转动的力
阻力:阻碍杠杆转动的力
——方向判断 动力臂:从支点到动力作用线的距离
阻力臂:从支点到阻力作用线的距离
支点、动力、阻力作用点都在杠杆上 杠杆的平衡条件(实验)——杠杆原理 动力×动力臂=阻力×阻力臂(F1L1= F2L2) 省力杠杆(费距离):动力臂大于阻力臂——动力小于阻力 费力杠杆(省距离):动力臂小于阻力臂——动力大于阻力 等臂杠杆(不省力也不费力):动力臂等于阻力臂——动力等于阻力 (举例) 二、滑轮——绕轴能转动的轮子——杠杆的变形
定滑轮:轴的位置固定不动的滑轮
——等臂杠杆(动阻力相等,可改变动力的方向) 动滑轮:轴的位置随被拉的物体一起运动的滑轮
——支点在一侧的不等臂杠杆(动力臂是阻力臂的两倍,使用时可以省一半的力,但不可以改变动力方向)
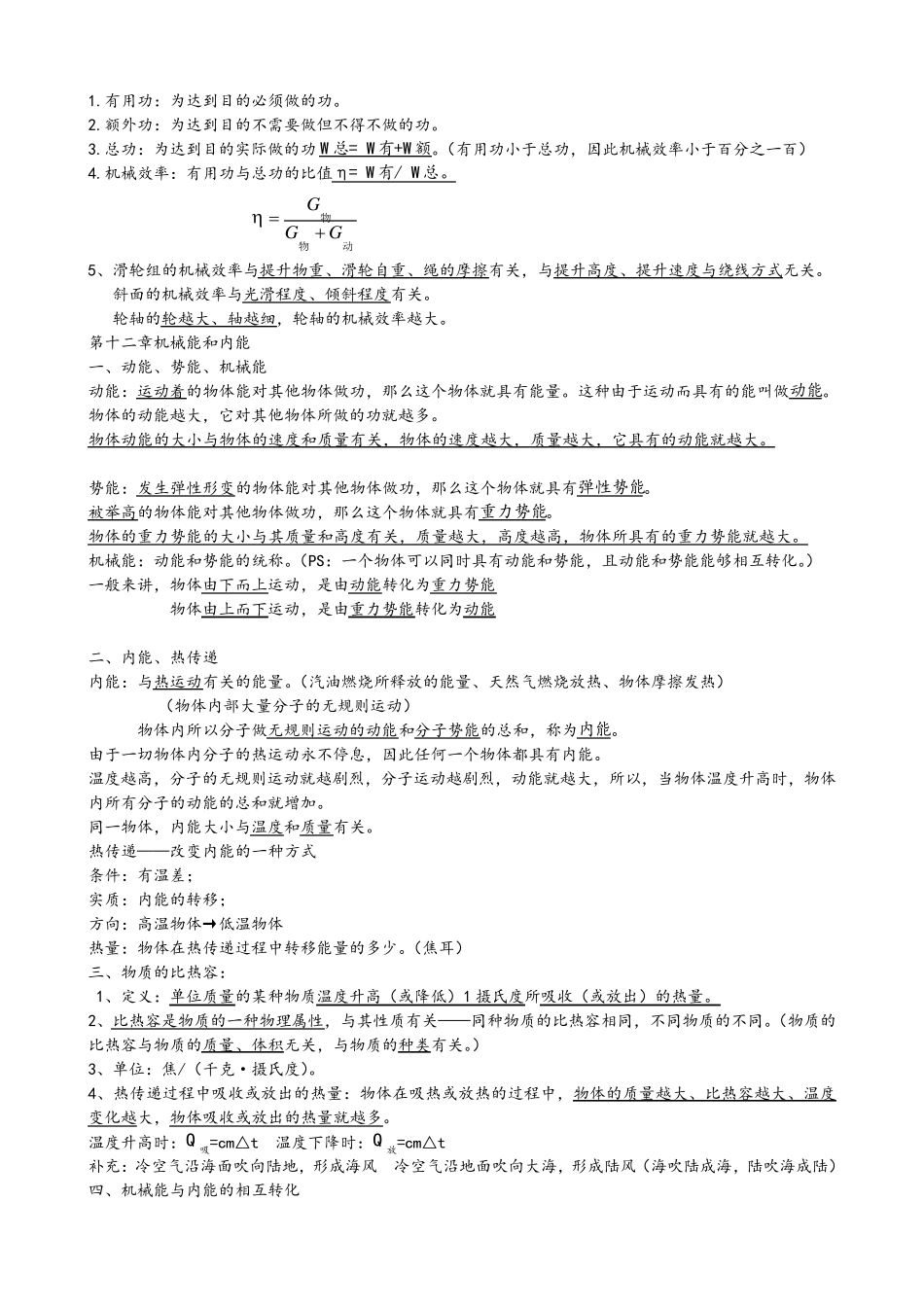
滑轮组:定滑轮和动滑轮组合成滑轮组,既省力又可改变力的方向)
——两种绳子绕法 用滑轮组起吊重物时,滑轮组用几段绳子吊物体,提起物体的力就是物重的几分之几
F=(G+G动)/n n是与动滑轮相连的绳子段数 三、功——无既省力又省距离的机械 功(机械功):力与物体在力的方向上通过距离的乘积
做功的两要素:作用在物体上的力和物体在力的方向上通过的距离
(公式:W=FS 单位:J) 四、功率 功率:单位时间内所做的功
(表示做功快慢的物理量)公式: P=W/t P=FV 单位:W 五、机械效率(实验) F1 F2 OL1 L2 F1 F2 l2 l1 O F1 F2 O l1 l2 1
有 用 功 : 为 达 到 目 的 必 须 做 的 功
额 外 功 : 为 达 到 目 的 不 需 要 做 但 不 得 不 做