哈尔滨工程大学船舶操纵性总结1
船舶操纵性含义:P1 2
良好的操纵性应具备哪些特性 具有良好操纵性的船舶,能够根据驾驶者的要求,既能方便、稳定地保持航向、航速,又能迅速地改变航向、航速,准确地执行各种机动任务
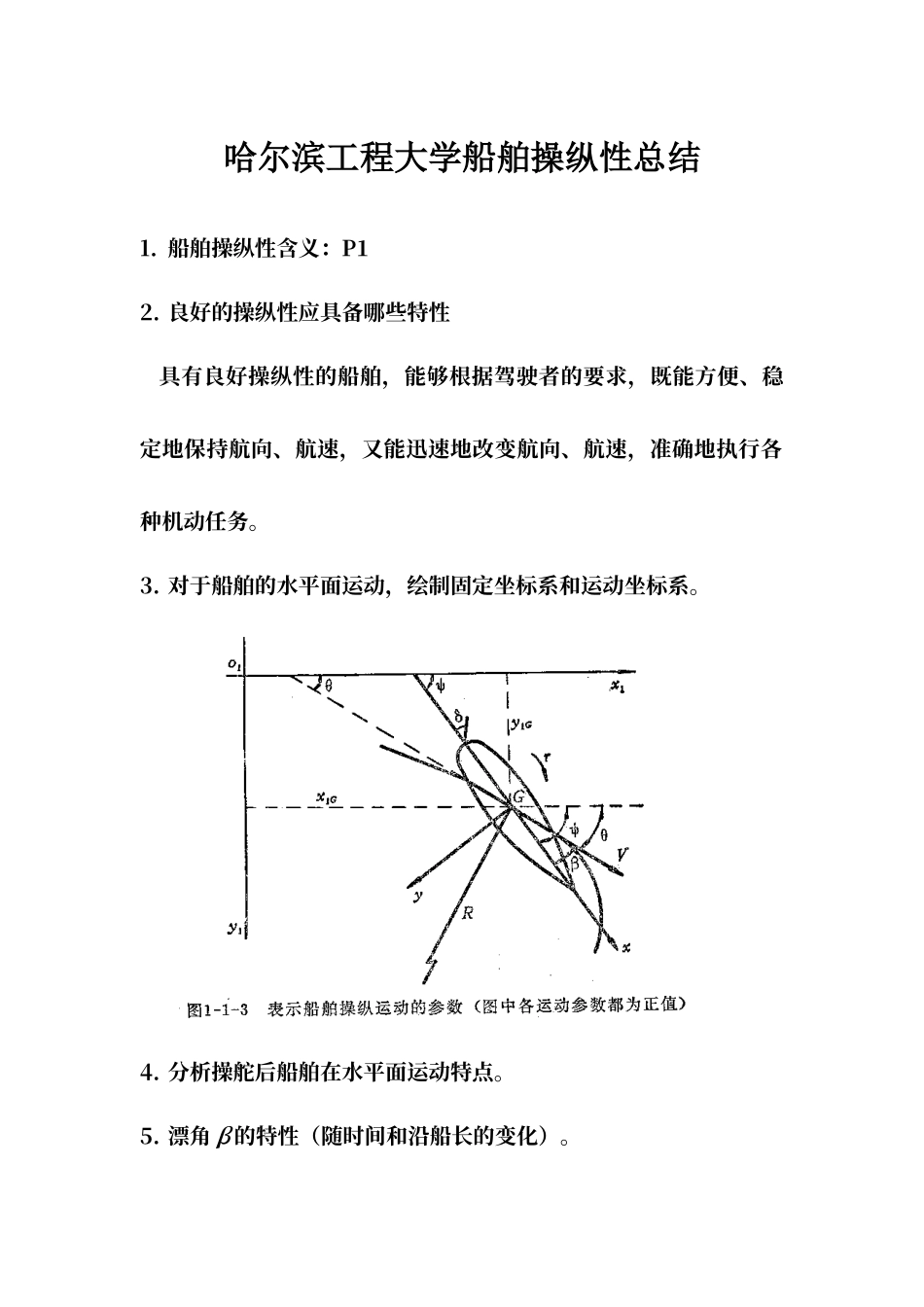
对于船舶的水平面运动,绘制固定坐标系和运动坐标系
分析操舵后船舶在水平面运动特点
漂角 β 的特性(随时间和沿船长的变化)
坐标原点在船的重心处时,船舶的运动方程的推导
作用在在船上的水动力是如何划分的
粘性水动力方程线性展开式及无因次化
线性水动力导数的物理意义和几何意义
物理意义:各线性水动力导数表示船舶在以 u=u0 运动的情况下,保持其它参数都不变,只改变某一个运动参数所引起船体所受水动力的改变与此运动参数的比值
几何意义:各线性水动力导数表示相应于某一变化参数的受力(矩)曲线在原点处的斜率
常见线性水动力导数的特点
船舶操纵水平面运动的线性方程组推导及无因次化
写出 MMG 方程中非线性水动力的三种表达式
首摇响应二阶线性 K-T 方程推导
一阶 K、T 方程及 K、T 含义,可应用什么操纵性试验测得
画图说明船舶在作直线航行时(舵角 δ=0),若受到某种扰动后,其重心运动轨迹的四种可能情况,并说明三种稳定性之间的关系
影响稳定性的因素有哪些17
船舶回转过程的三个阶段及船舶在各个过程运动特点(速度、加速度信息)18
船舶回转运动主要特征参数
影响定常回转直径的 5 个因素是什么20
推导船舶定常回转时横倾角的确定公式
根据操舵规律由线性响应方程求解舶的回转角速度和艏向角
如何获得船舶的水动力导数 可以通过理论数值计算、经验公式估算和拘束模型的水动力试验三种方法来获得船舶的水动力导数
拘束模型试验一般包括哪几种24
了解斜航验原理、方法,清