手自动及无扰切换本设计中,通过扫描计算机按键来控制自动状态与手动状态的切换及量值的增减
这里的手动,实际上是由计算机实现的“软手动”1) 自动状态当扫描到按键“A”时,系统切换为自动状态,由 PID 控制器计算偏差输出控制量
自动状态下,可通过“U”“D”两个按键分别实现设定值 sp 的加和减
由于算法本身对控制量有保持作用,可实现自动至手动的无扰切换
2) 手动状态当扫描到按键“M”时,系统切换为手动状态,此时 PID 控制器不工作,由手操器直接改变控制量的加减,输出给对象
手动状态下,可通过“ U”“D”两个按键分别实现控制量 u2 的加和减
要实现手动的自动的无扰切换,需要使 u(k)=0,即应使 e(k-1), e(k-2)和 u(k-1)=0等历史状态清零,同时使切换时偏差 e(k)=0
故在手动状态下,让主调的 sp 跟踪pv,同时让副调的输入量 u1 跟踪反馈量 x1,此时切换可实现无扰
PID 参数整定根据对象特性,,初始 PID 参数为 Ti=n*T,Td=(1/3~1/8)Ti
设初始 PID 参数为:PID1: Kp1=, Ti1=, Td1=, Tf=PID2: Kp2=, Ti2=, Td1=, Tf=发现前期控制量太小,控制作用太弱,后期控制量大,使超调量较大
故适当增大微分作用,减小积分作用,使系统受到阶跃扰动时,前期快速动作,同时可以减少超调量
最终参数为:3
纯迟延模块传入参数:输入值、迟延时间、采样时间迟延周期数等于迟延时间除以采样时间
将输入值存入一个队列,每个周期将历史值右移,固定周期后输出
此时输出值是数周期前的输入值,从而达到纯迟延的效果
理想 PID 算法5
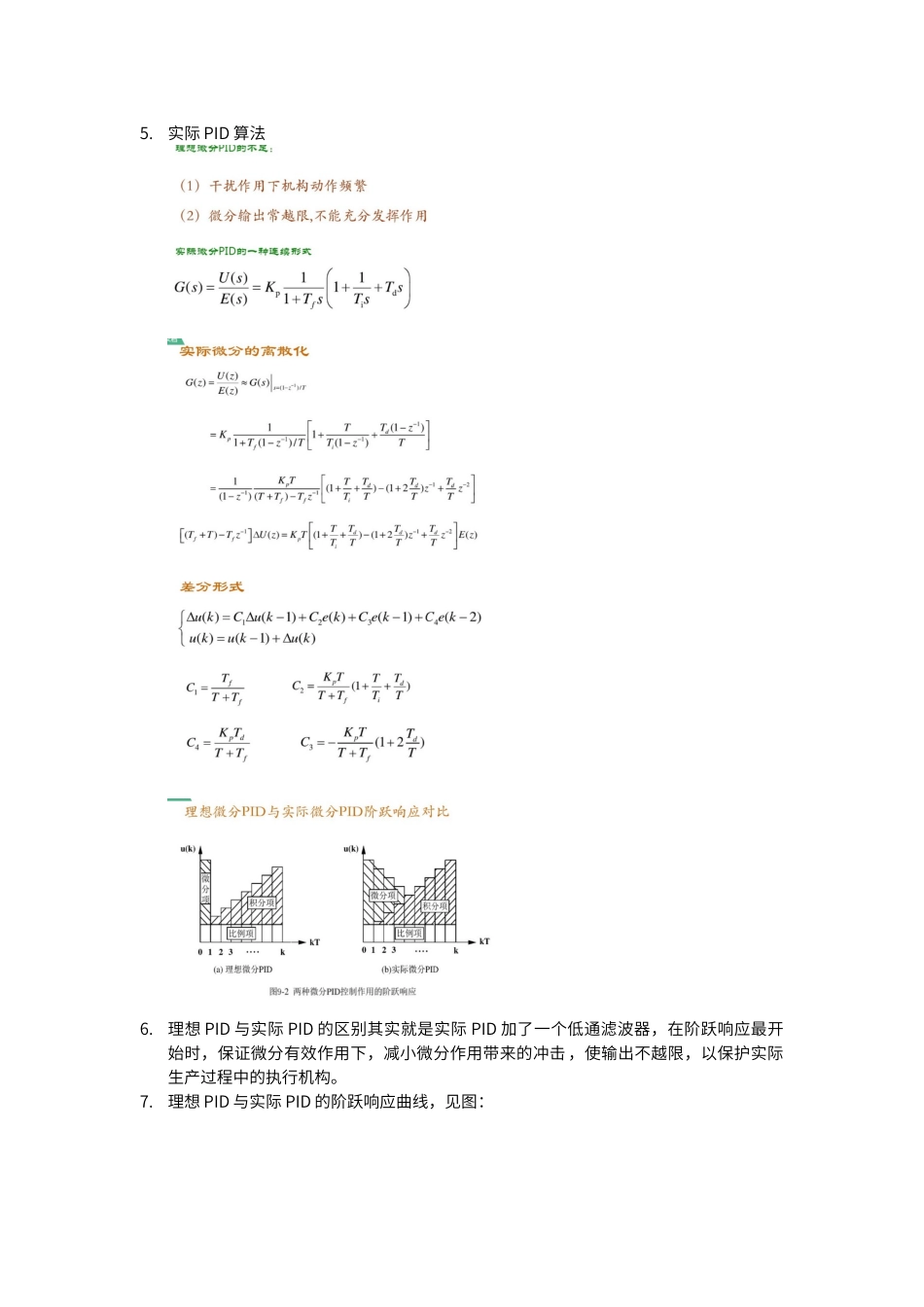
实际 PID 算法6
理想 PID 与实际 PID 的区别其实就是实际 PID 加了一个低通滤波器,在阶跃响应最开始时,保证微分有效作用下,减小微分作用带来的冲