填写表格注意事项:此表红色部分一经提交无法修改,请谨慎填写
(以此表格电子资料为依据)填完请发给总经理
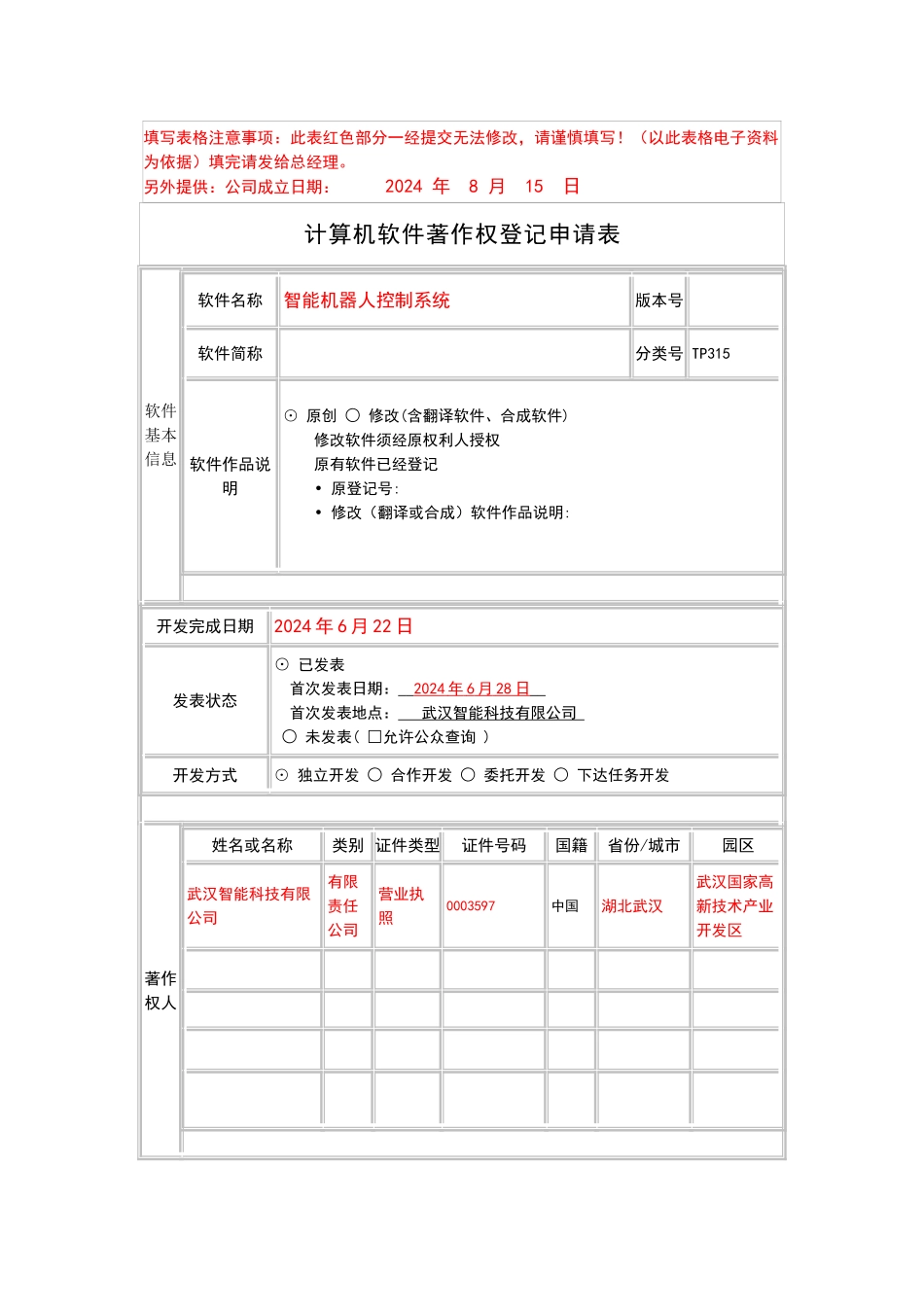
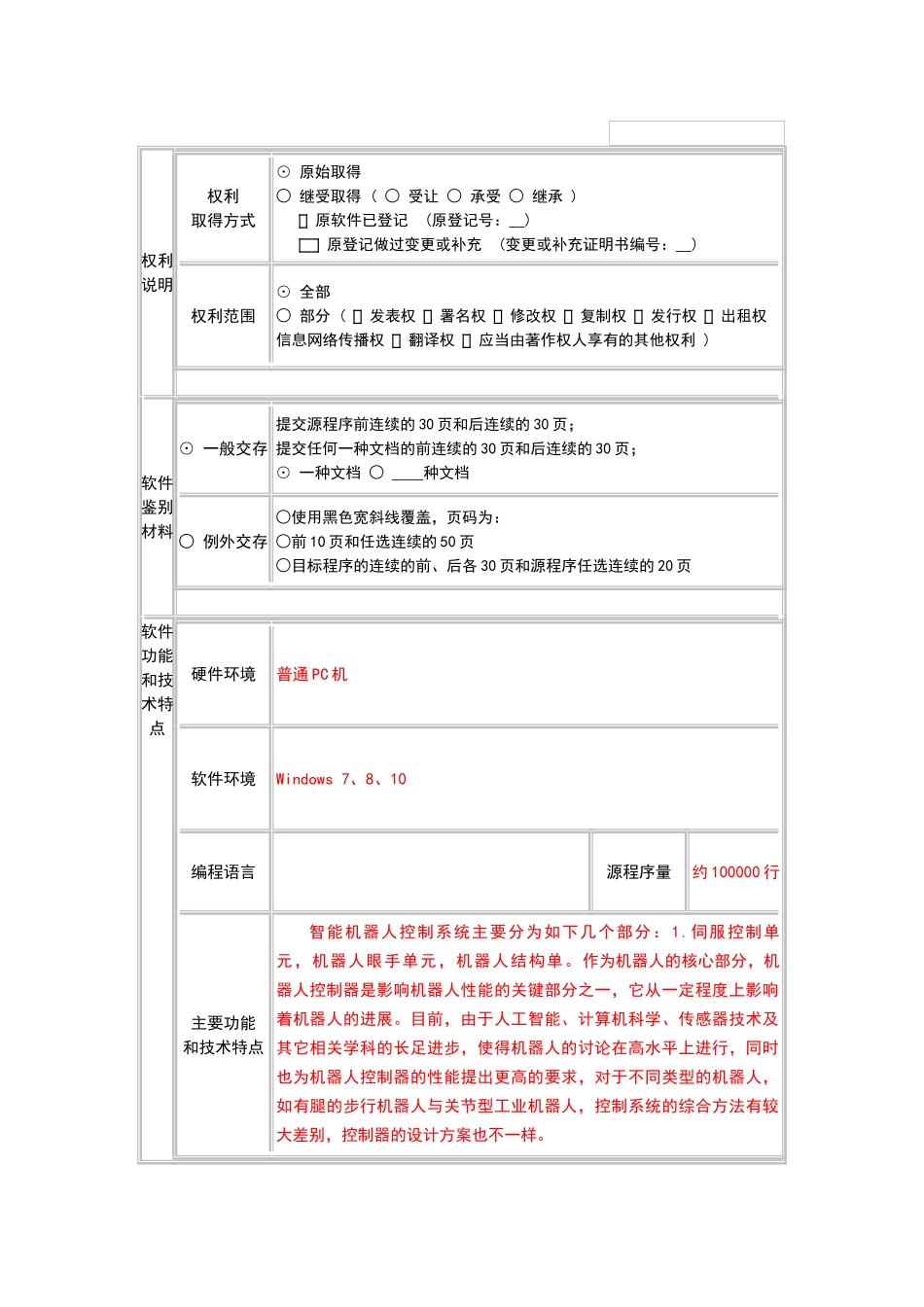
另外提供:公司成立日期: 2024 年 8 月 15 日计算机软件著作权登记申请表软件基本信息软件名称智能机器人控制系统版本号软件简称分类号 TP315软件作品说明⊙ 原创 ○ 修改(含翻译软件、合成软件) 修改软件须经原权利人授权 原有软件已经登记 • 原登记号: • 修改(翻译或合成)软件作品说明: 开发完成日期2024 年 6 月 22 日发表状态⊙ 已发表 首次发表日期: 2024 年 6 月 28 日 首次发表地点: 武汉智能 科技 有限公司 ○ 未发表( □允许公众查询 ) 开发方式⊙ 独立开发 ○ 合作开发 ○ 委托开发 ○ 下达任务开发 著作权人姓名或名称类别 证件类型证件号码国籍省份/城市园区武汉智能科技有限公司有限责任公司营业执照0003597中国湖北武汉武汉国家高新技术产业开发区 权利说明权利取得方式⊙ 原始取得○ 继受取得 ( ○ 受让 ○ 承受 ○ 继承 ) 原软件已登记 (原登记号: ) 原登记做过变更或补充 (变更或补充证明书编号: ) 权利范围⊙ 全部○ 部分 ( 发表权 署名权 修改权 复制权 发行权 出租权 信息网络传播权 翻译权 应当由著作权人享有的其他权利 ) 软件鉴别材料⊙ 一般交存 提交源程序前连续的 30 页和后连续的 30 页;提交任何一种文档的前连续的 30 页和后连续的 30 页;⊙ 一种文档 ○ 种文档 ○ 例外交存 ○使用黑色宽斜线覆盖,页码为: ○前 10 页和任选连续的 50 页 ○目标程序的连续的前、后各 30 页和源程序任选连续的 20 页 软件功能和技术特点硬件环境普通 PC 机软件环境Windows 7、8、10编程语言源程序量约 100000 行主要功能和技术特点智能机器人控制系统主要分为如下几个部分: