DOI:10
16525/j
cn14- 1134/th
011总第 193 期2019 年第5 期机械管理开发MECHANICALMANAGEMENTANDDEVELOPMENTTotal 193No
5,2019引言尽管当前机械手并没有人类的手一般灵巧、多变,但是它可以代替人类的手进行劳动,并且有不怕危险、不怕辛苦的优点,另外,机械手抓取东西的时候力量比较大,并可以长时间的进行劳动,劳动力度比较大
所以机械手的发展会为人类带来福音,并且其已经获得了很多部门的关注,也越来越多地被应用到了实际工作中
在很多流水线方面的工作上,机械手便可以代替人类,进行零部件加工等,不仅为企业节约了人力成本,并且也减少了员工培训等方面的烦恼
因此,对控制机械手进行设计
1总体设计1
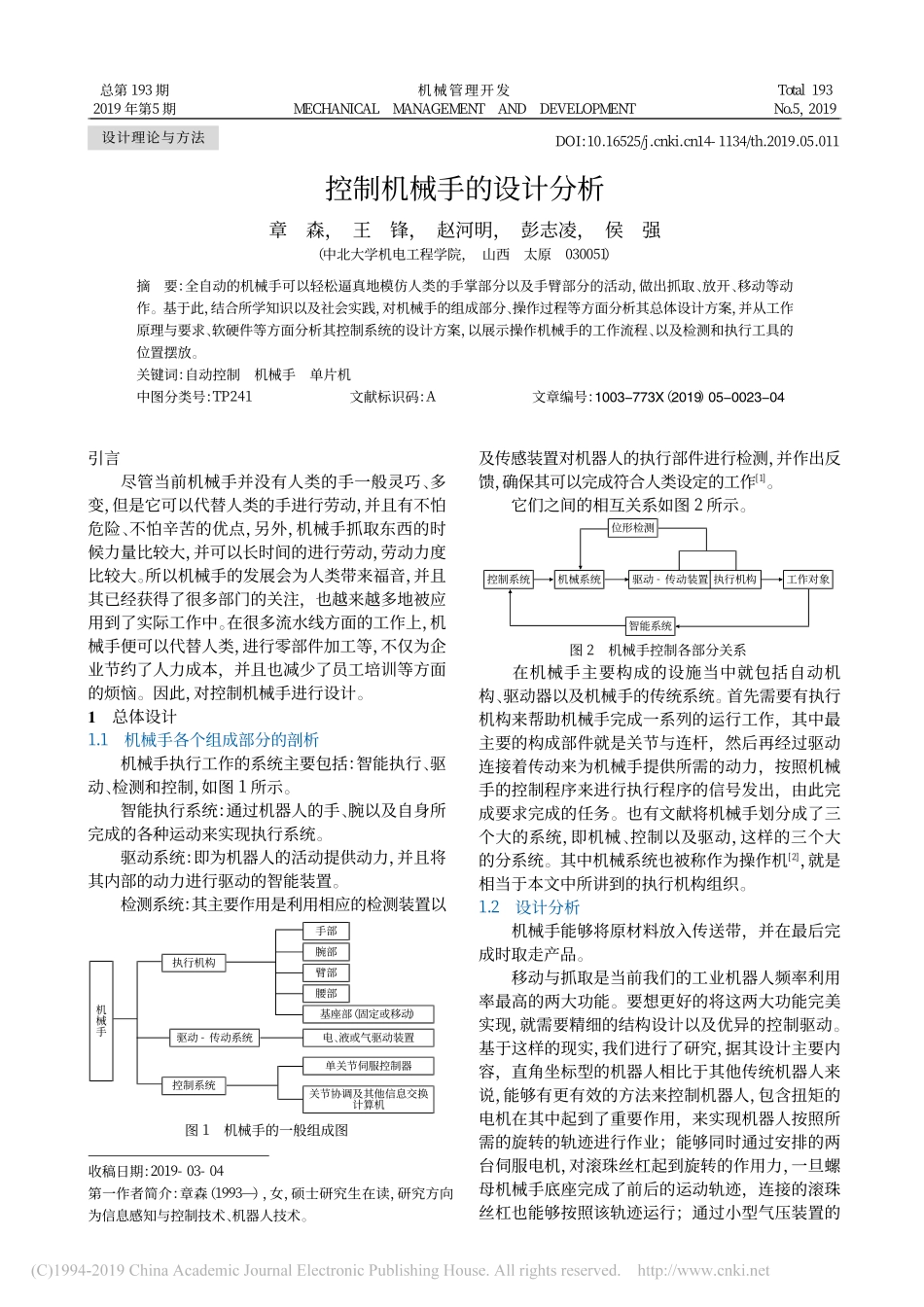
1机械手各个组成部分的剖析机械手执行工作的系统主要包括:智能执行、驱动、检测和控制,如图 1 所示
智能执行系统:通过机器人的手、腕以及自身所完成的各种运动来实现执行系统
驱动系统:即为机器人的活动提供动力,并且将其内部的动力进行驱动的智能装置
检测系统:其主要作用是利用相应的检测装置以及传感装置对机器人的执行部件进行检测,并作出反馈,确保其可以完成符合人类设定的工作[1]
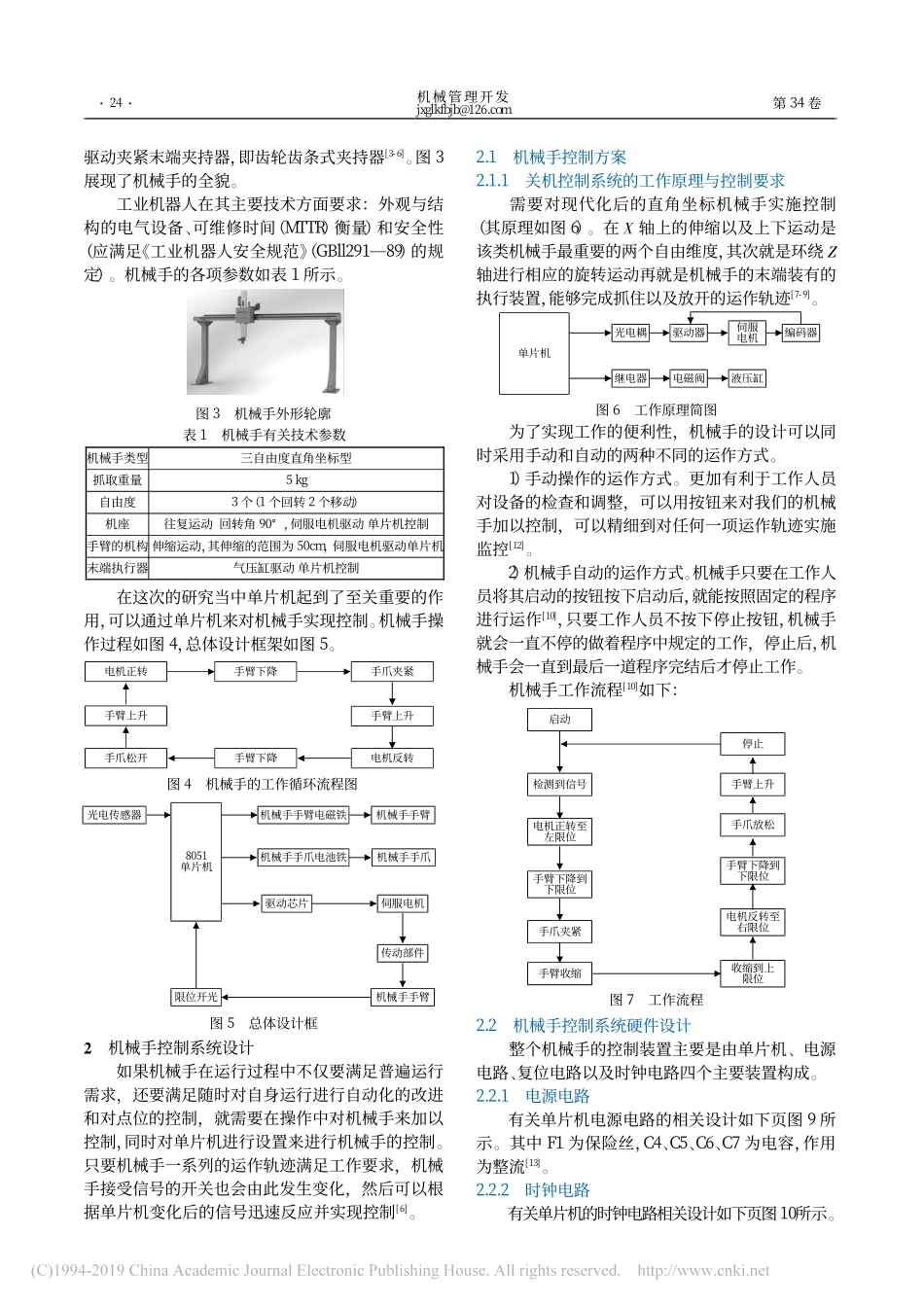
它们之间的相互关系如图 2 所示
在机械手主要构成的设施当中就包括自动机构、驱动器以及机械手的传统系统
首先需要有执行机构来帮助机械手完成一系列的运行工作,其中最主要的构成部件就是关节与连杆,然后再经过驱动连接着传动来为机械手提供所需的动力,按照机械手的控制程序来进行执行程序的信号发出,由此完成要求完成的任务
也有文献将机械手划分成了三个大的系统,即机械、控制以及驱动,这样的三个大的分系统
其中机械系统也被称作为操作机[2],就是相当于本文中所讲到的执行机构组织
2设计分析机械手能够将原材料放入传送带,并在最后完