工作方式有两种,分别是自动方式、手动工作方式
前者又可以分为 4 种工作方式,包括单周期、自动回到起点、连续运行、单步运行
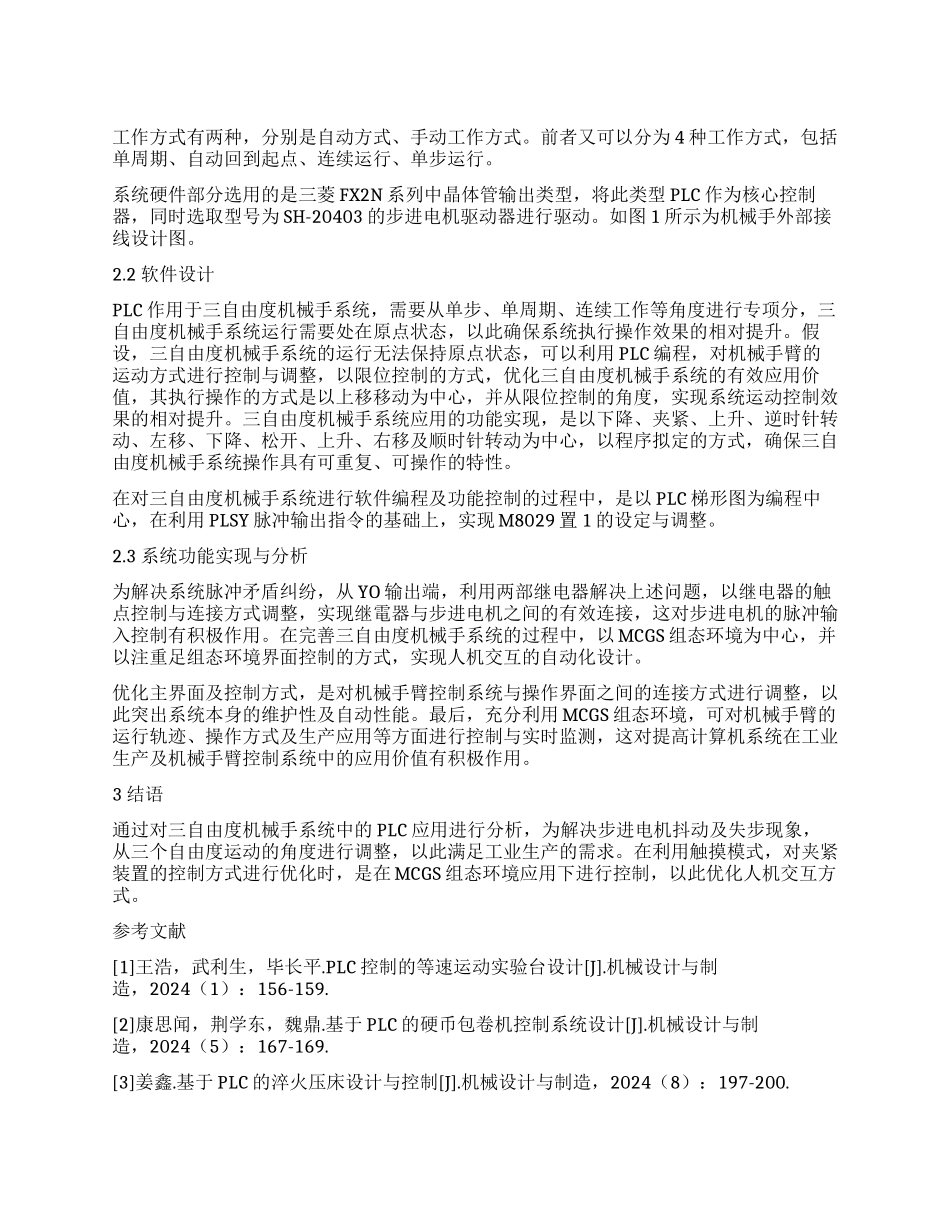
系统硬件部分选用的是三菱 FX2N 系列中晶体管输出类型,将此类型 PLC 作为核心控制器,同时选取型号为 SH-20403 的步进电机驱动器进行驱动
如图 1 所示为机械手外部接线设计图
2 软件设计PLC 作用于三自由度机械手系统,需要从单步、单周期、连续工作等角度进行专项分,三自由度机械手系统运行需要处在原点状态,以此确保系统执行操作效果的相对提升
假设,三自由度机械手系统的运行无法保持原点状态,可以利用 PLC 编程,对机械手臂的运动方式进行控制与调整,以限位控制的方式,优化三自由度机械手系统的有效应用价值,其执行操作的方式是以上移移动为中心,并从限位控制的角度,实现系统运动控制效果的相对提升
三自由度机械手系统应用的功能实现,是以下降、夹紧、上升、逆时针转动、左移、下降、松开、上升、右移及顺时针转动为中心,以程序拟定的方式,确保三自由度机械手系统操作具有可重复、可操作的特性
在对三自由度机械手系统进行软件编程及功能控制的过程中,是以 PLC 梯形图为编程中心,在利用 PLSY 脉冲输出指令的基础上,实现 M8029 置 1 的设定与调整
3 系统功能实现与分析为解决系统脉冲矛盾纠纷,从 YO 输出端,利用两部继电器解决上述问题,以继电器的触点控制与连接方式调整,实现继電器与步进电机之间的有效连接,这对步进电机的脉冲输入控制有积极作用
在完善三自由度机械手系统的过程中,以 MCGS 组态环境为中心,并以注重足组态环境界面控制的方式,实现人机交互的自动化设计
优化主界面及控制方式,是对机械手臂控制系统与操作界面之间的连接方式进行调整,以此突出系统本身的维护性及自动性能
最后,充分利用 MCGS 组态环境,可对机械手臂的运行轨迹、操作方式及