基于单片机的智能寻迹小车一.方案设计与论证1
1 控制模块 采纳 STC89C52 单片机设计中采纳了一款十分常用的 51 系列单片机作为处理器,特点是价格低廉、使用方便,且可与其他处理器进行通讯
系统时钟:晶振频率 1/12,本设计采纳 12M 晶振,因此系统时钟为 1us
I/O 口资源:4 个通用 8 位准双向 I/O 口(P0、P1、P2、P3,其中 P3 为特别功能口)
通讯:一对全双工串行通讯口(P3
1),可与其他单片机或上位机进行通讯
中断:2 个外部中断(/INT0、/INT1),2 个定时器中断(T0、T1),1 个串行通讯中断,共 5 个中断资源并有 2 级中断优先级可供配置
ROM:该单片机提供 8K 的 ROM 供用户编写程序
2 寻黑胶带方案方案一、可见光发光二级管组成的发射-接收电路
这种方案的缺点在于其他环境光源会对光敏二极管的工作产生很大干扰,一旦外界光亮条件改变,很可能造成误判和漏判;虽然实行超高亮发光管可以降低一定的干扰,但这又将增加额外的功率损耗
方案二、反射式红外发射-接收器
由于采纳红外管代替普通可见光管,可以降低环境光源干扰,大大减小了误判和漏判的可能性
经过比较选择方案二
电机的选择和控制方案一:采纳电阻网络或数字电位器调整电动机的分压,从而达到调速的目的
但是电阻网络只能实现有级调速,而数字电阻元件价格比较昂贵
更主要的问题在于一般电动机的电阻比较小,但电流比较大;分压不仅降低了效率,而且实现很困难
方案二:采纳继电器对电动机的开或关进行控制,通过开关的切换对电动机的转速进行控制,此方案的优点是电路比较简单,缺点是继电器的响应时间慢,机械结构易损坏,寿命较短、可靠性不高
方案三:采纳由达林顿管组成的 H 型 PWM 电路
用单片机控制达林顿管使之工作在占空比可调的开关状态,精准调整电动机转速
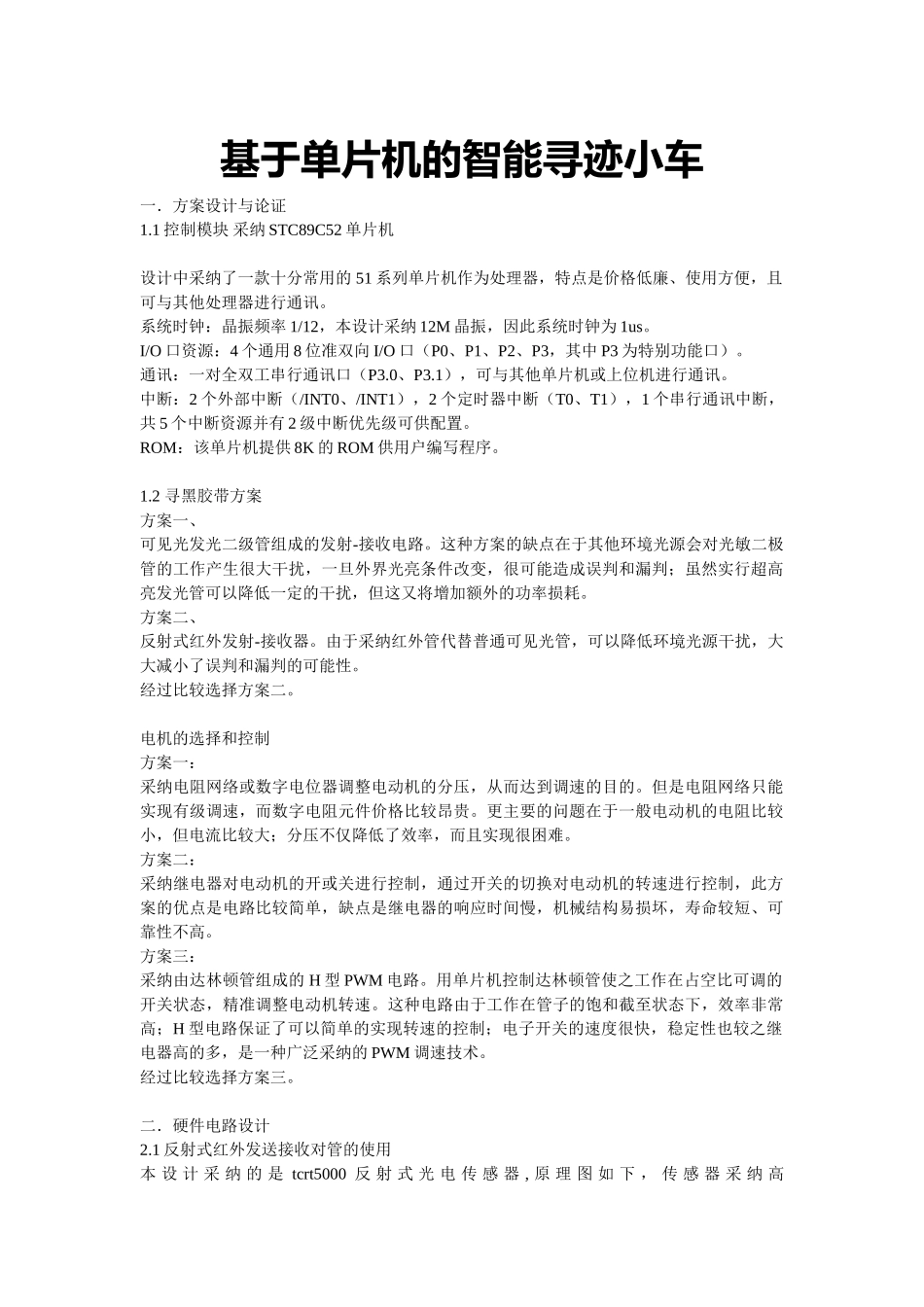
这种电路由于工作在