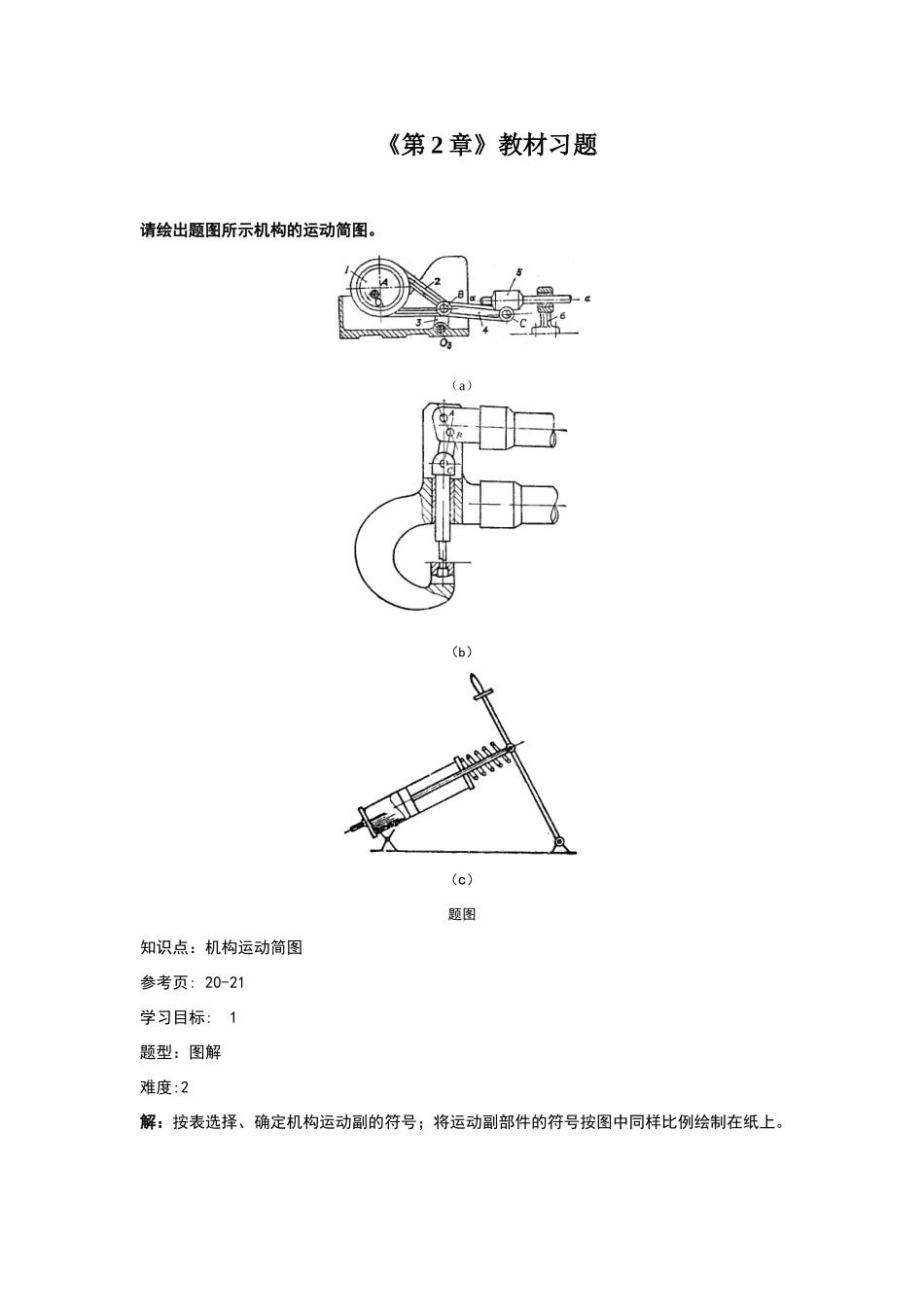
《第 2 章》教材习题请绘出题图所示机构的运动简图
(a) (b)(c)题图知识点:机构运动简图参考页: 20-21学习目标: 1题型:图解难度:2解:按表选择、确定机构运动副的符号;将运动副部件的符号按图中同样比例绘制在纸上
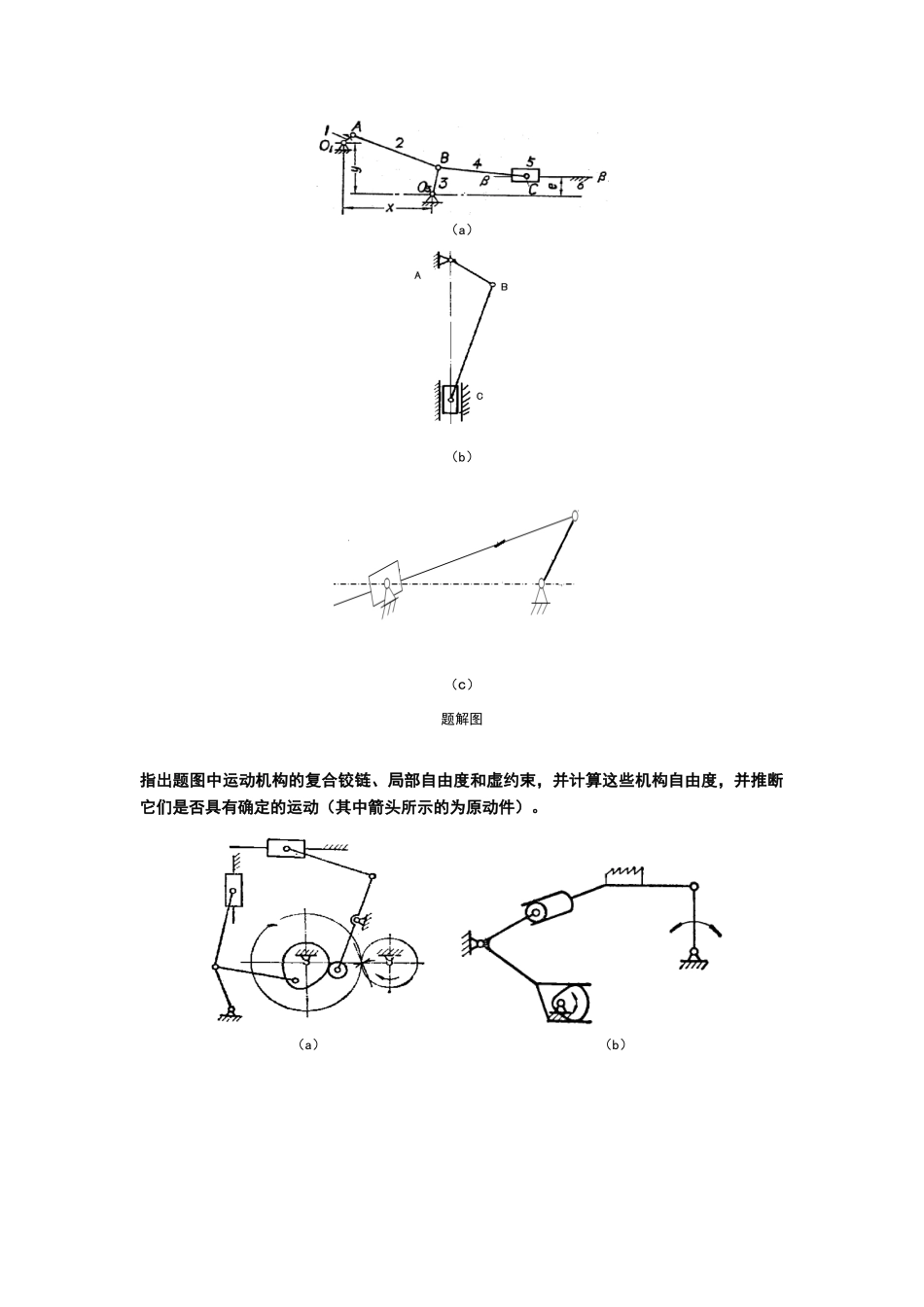
(a) (b)(c)题解图指出题图中运动机构的复合铰链、局部自由度和虚约束,并计算这些机构自由度,并推断它们是否具有确定的运动(其中箭头所示的为原动件)
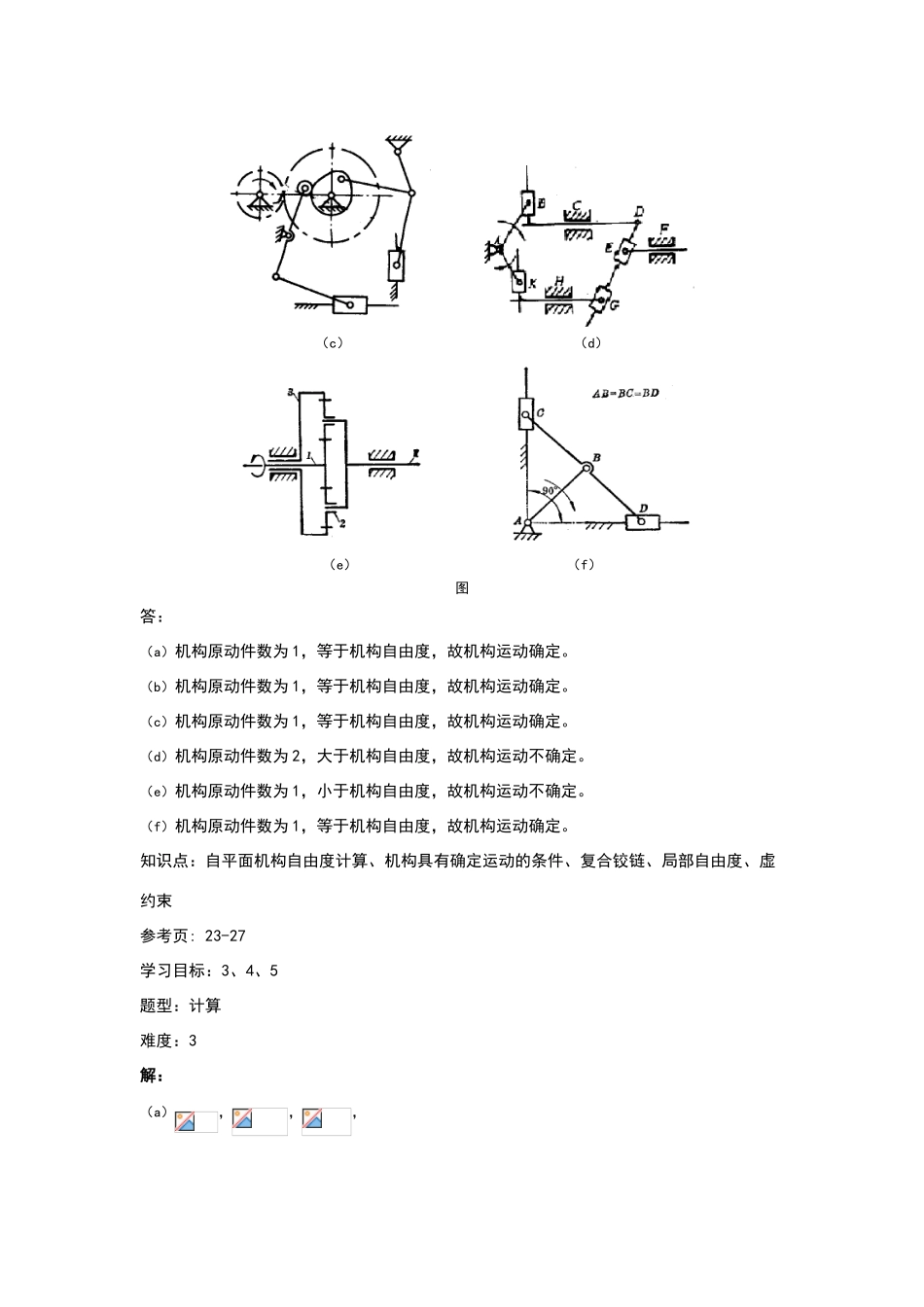
(a) (b) (c) (d) (e) (f)图答:(a)机构原动件数为 1,等于机构自由度,故机构运动确定
(b)机构原动件数为 1,等于机构自由度,故机构运动确定
(c)机构原动件数为 1,等于机构自由度,故机构运动确定
(d)机构原动件数为 2,大于机构自由度,故机构运动不确定
(e)机构原动件数为 1,小于机构自由度,故机构运动不确定
(f)机构原动件数为 1,等于机构自由度,故机构运动确定
知识点:自平面机构自由度计算、机构具有确定运动的条件、复合铰链、局部自由度、虚约束参考页: 23-27学习目标:3、4、5题型:计算难度:3解:(a),,,B 处为复合铰链,D 处为局部自由度,机构原动件数为 1 个,等于机构自由度,故机构运动确定
(b),,,A 处为虚约束
机构原动件数为 1,等于机构自由度,故机构运动确定
(c),,,M 处为复合铰链,C 处为局部自由度,G 处为虚约束,因机构原动件数为 1,等于机构自由度,故机构运动确定
(d),,,无复合铰链、局部自由度、虚约束等特别情况,机构原动件数为 2,等于机构自由度,故机构运动不确定
(e),,,A 处为复合铰链、齿轮 2 为虚约束,机构原动件数为 1,小于机构自由度,故机构运动不确定
(f),,AB 杆可以认为是虚约束,机构原动件数为 1,等于机构自由度,故机构运动确定