摘 要我们组设计的磁悬浮小灯控制系统是基于 TMS320F28377s DSP 芯片
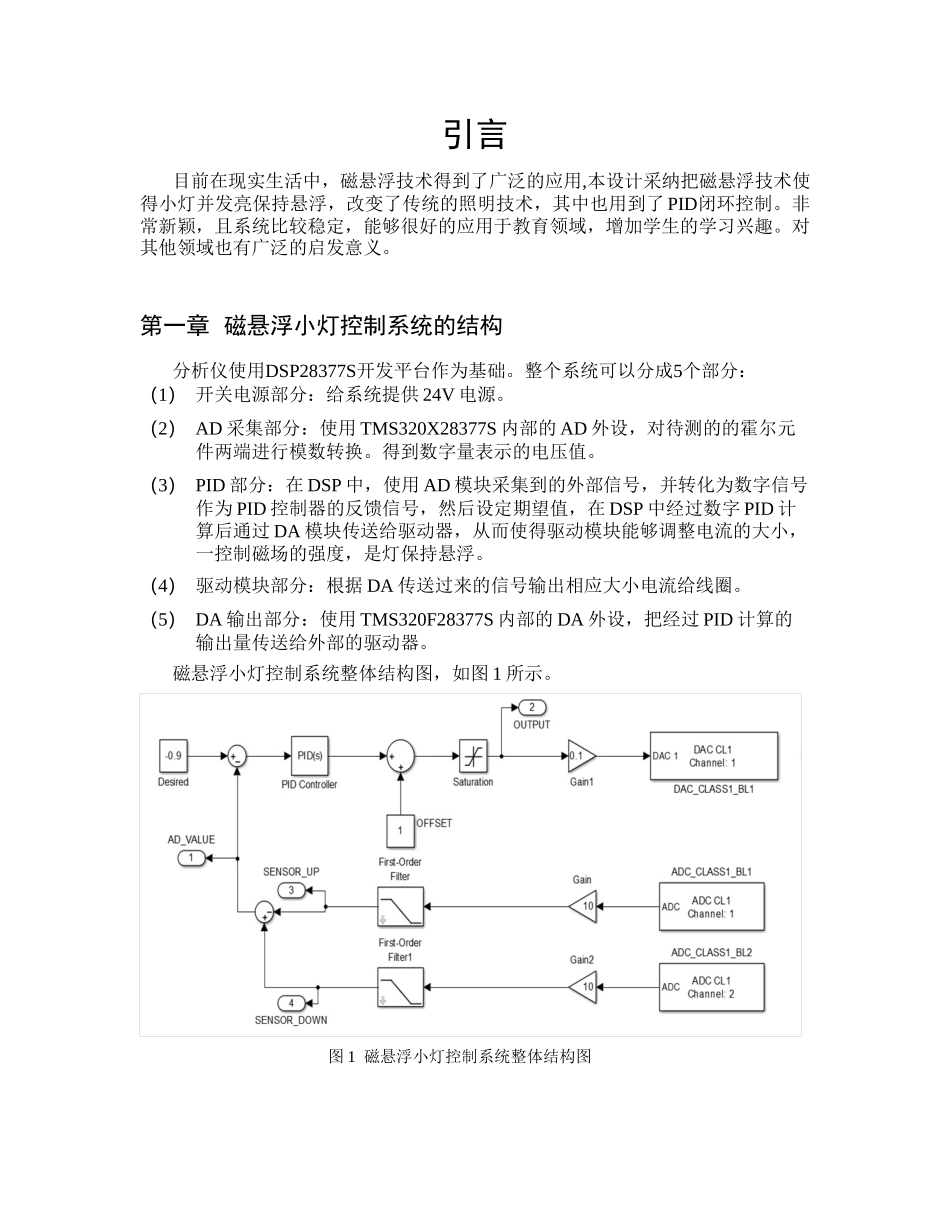
本设计采纳了上下两个霍尔元件作为感应器,通过 DSP 中的 AD 模块去采集这两路信号,然后经过PID 控制后把输出通过 DSP 的 DA 模块将数据发送到驱动器控制线圈电流大小,以改变磁场来控制灯的位置使其保持悬浮,整个系统够成了一个闭环控制系统,抗干扰能力强,新颖且可广泛于教育领域,增加学生的学习兴趣
Abstract关键词:TMS320F28337S PID 控制 闭环控制系统目 录摘要……………………………………………………………………ⅠAbstract………………………………………………………………Ⅰ引言……………………………………………………………………1第一章 磁悬浮小灯控制系统的结构 ………………………………11
1 电源部分 …………………………………………………………21
2 AD 转换部分 ………………………………………………………21
3 PID 部分 …………………………………………………………31
4 DA 转换部分 ………………………………………………………41
5 驱动器部分 ………………………………………………………5第二章 程序流程图…………………………………………………6结论……………………………………………………………………6致谢……………………………………………………………………6参考文献………………………………………………………………7附录……………………………………………………………………8引言目前在现实生活中,磁悬浮技术得到了广泛的应用,本设计采纳把磁悬浮技术使得小灯并发亮保持悬浮,改变了传统的照明技术,其中也用到了 PID闭环控制
非常新颖,且系统比较稳定,能够很好的应用于教育领域,增加学生的学习兴趣
对其他领域也有广泛的启发意义