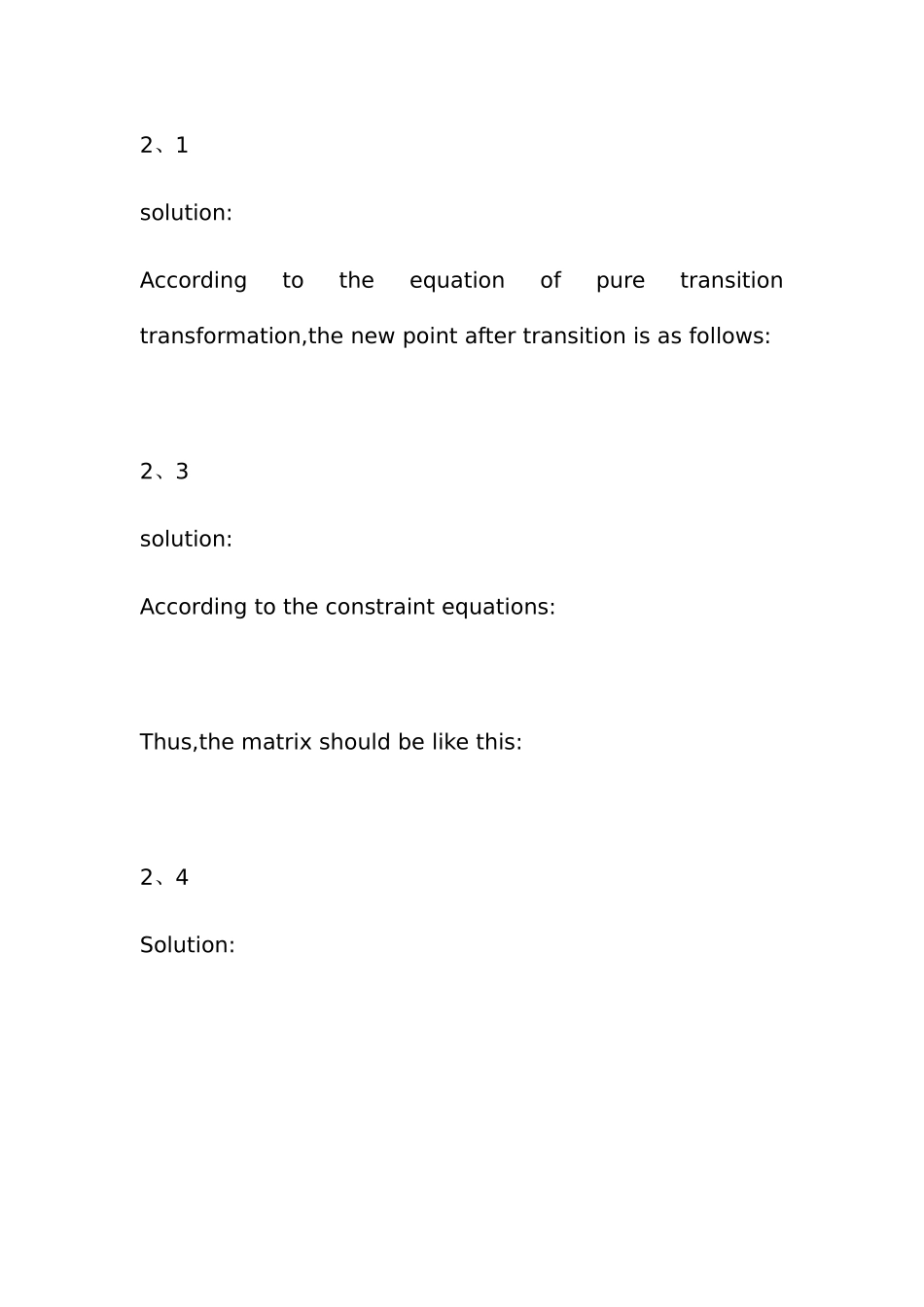
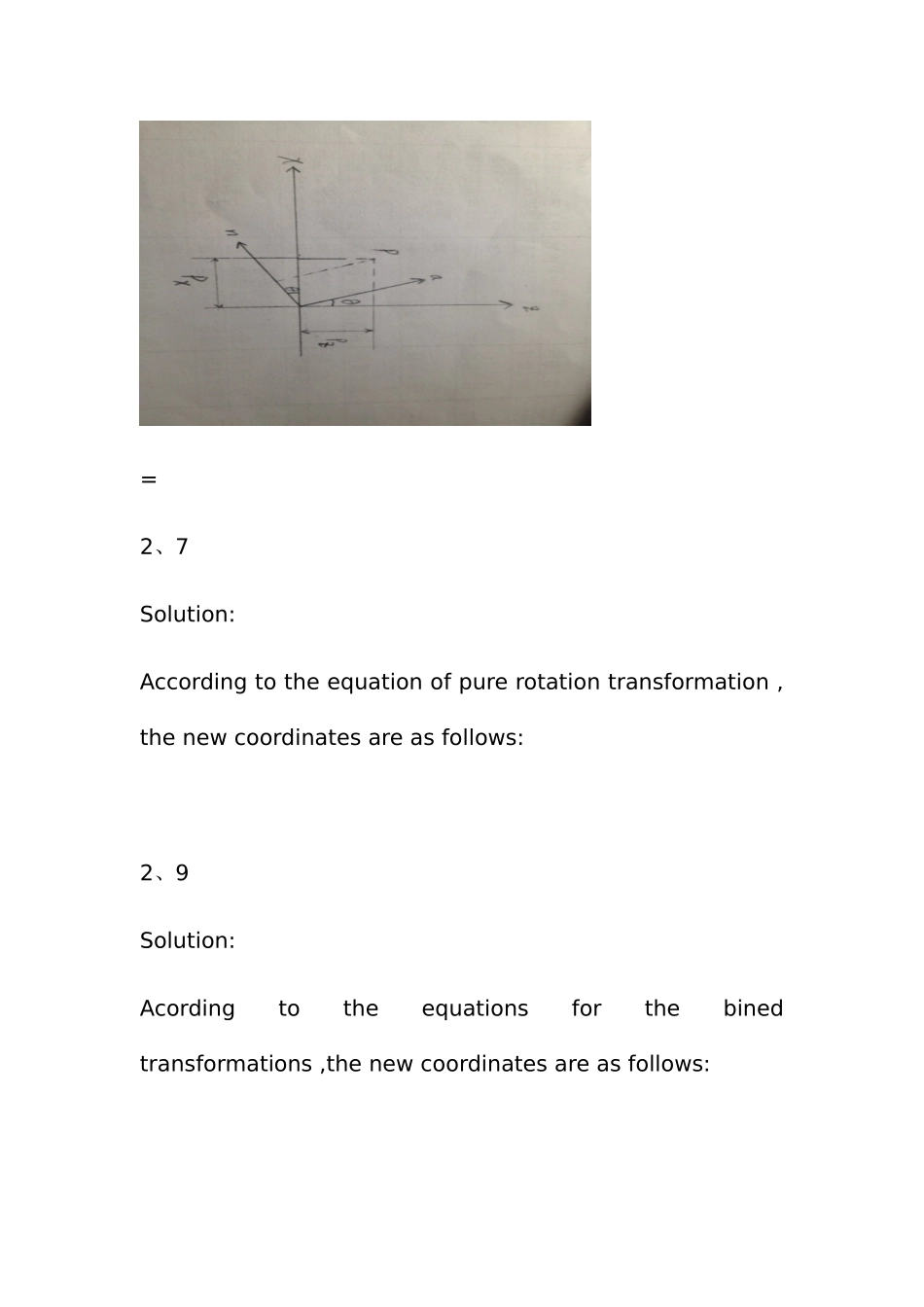
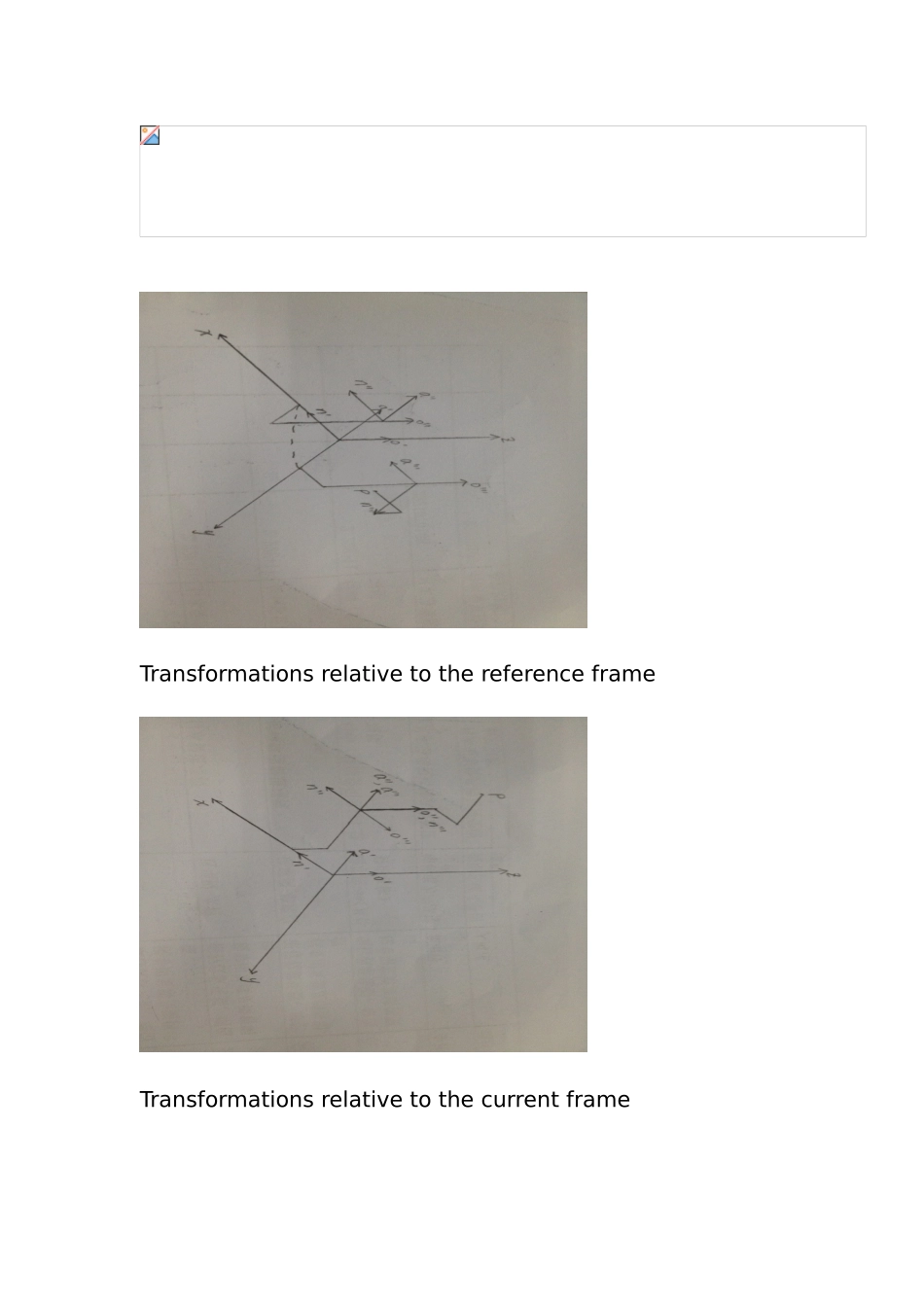
2、1 solution:According to the equation of pure transition transformation,the new point after transition is as follows:2、3solution:According to the constraint equations:Thus,the matrix should be like this:2、4Solution:=2、7Solution:According to the equation of pure rotation transformation , the new coordinates are as follows:2、9Solution:Acording to the equations for the bined transformations ,the new coordinates are as follows:Transformations relative to the reference frameTransformations relative to the current frameAB-1-12、10 P=Trans(5,3,6)Rot(x,90)Rot(a,90) P 1 0 0 5 1 0 0 0 0 -1 0 0 2= 0 1 0 3 0 0 -1 0 1 0 0 0 3 0 0 1 6 0 1 0 0 0 0 1 0 5 0 0 0 1 0 0 0 1 0 0 0 1 1 2= -2 8 12、12 0、527 0、369 -0、766 -0、601T1 = -0、574 0、819 0 -2、947 0、628 0、439 0、643 -5、38 0 0 0 1 0、92 0 -0、39 -3、82unitsunitsT