有用数值方法(Matlab)小论文题目: 基于 Matlab 实现曲柄摇杆机构的运动设计 小组成员姓名: 毛晓雯 学号: 202502070607 班级: 机自 6 班 2025—2025(1)学期提交日期:2025 年 12 月 29 日基于 Matlab 实现曲柄摇杆机构的运动设计 1 问题提出与数学模型的建立曲柄摇杆机构是铰链四杆机构中的一种,在实际工程应用中,该机构应用广泛,如缝纫机踏板机构、搅拌机机构等
现要求设计一曲柄摇杆机构,能同时实现以下几个要素:1)为提高机构的急回特性,极位夹角 应尽可能大(); 2)为改善机构的传力性能,当该机构曲柄与连杆重叠共线时,最大压力角尽可能小();3)该摇杆摆角
1 设计变量的确定设分别为该四杆机构的杆长,考虑计算的方便性,令,,,,于是设计变量为
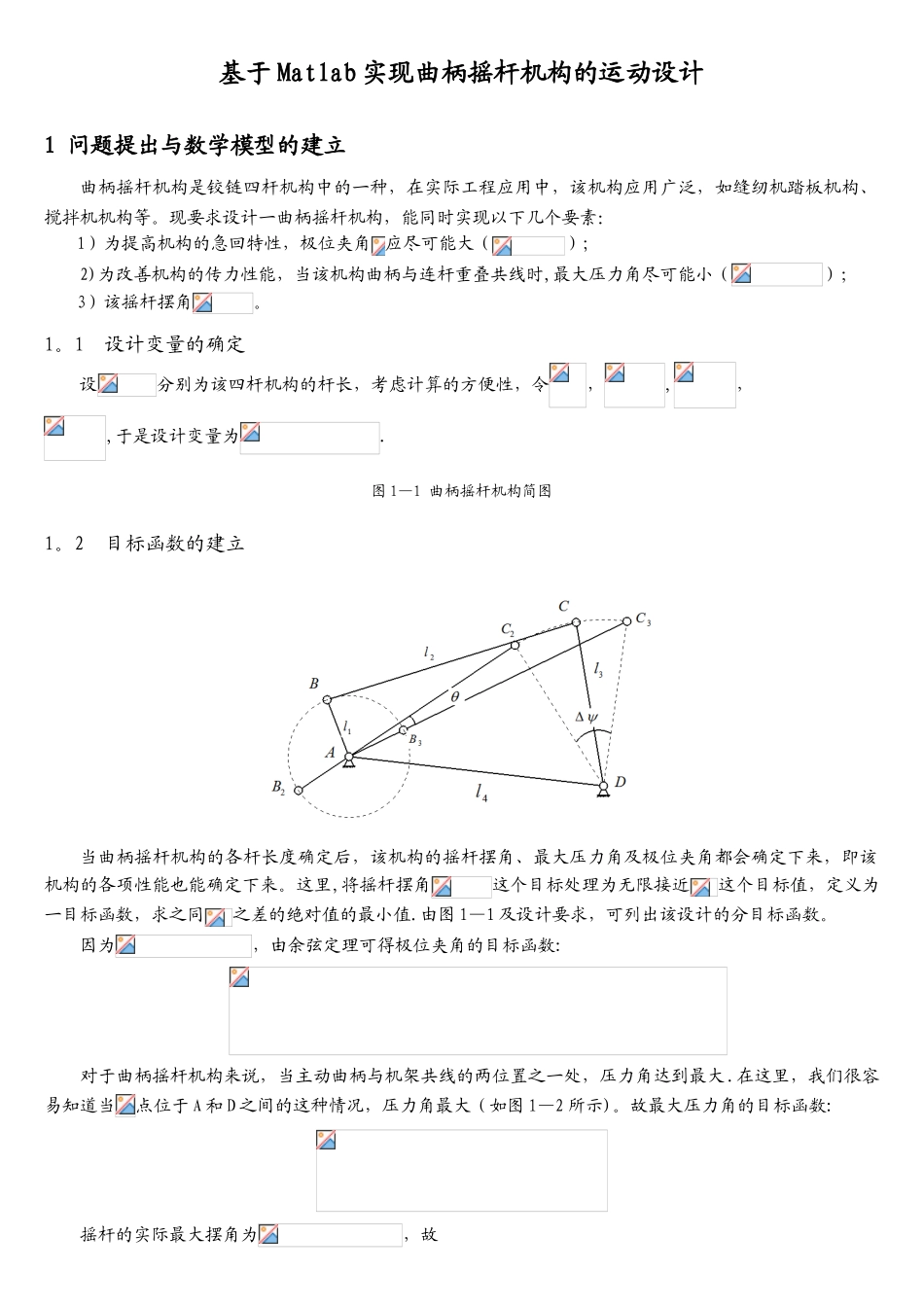
图 1—1 曲柄摇杆机构简图1
2 目标函数的建立当曲柄摇杆机构的各杆长度确定后,该机构的摇杆摆角、最大压力角及极位夹角都会确定下来,即该机构的各项性能也能确定下来
这里,将摇杆摆角这个目标处理为无限接近这个目标值,定义为一目标函数,求之同之差的绝对值的最小值
由图 1—1 及设计要求,可列出该设计的分目标函数
因为,由余弦定理可得极位夹角的目标函数: 对于曲柄摇杆机构来说,当主动曲柄与机架共线的两位置之一处,压力角达到最大
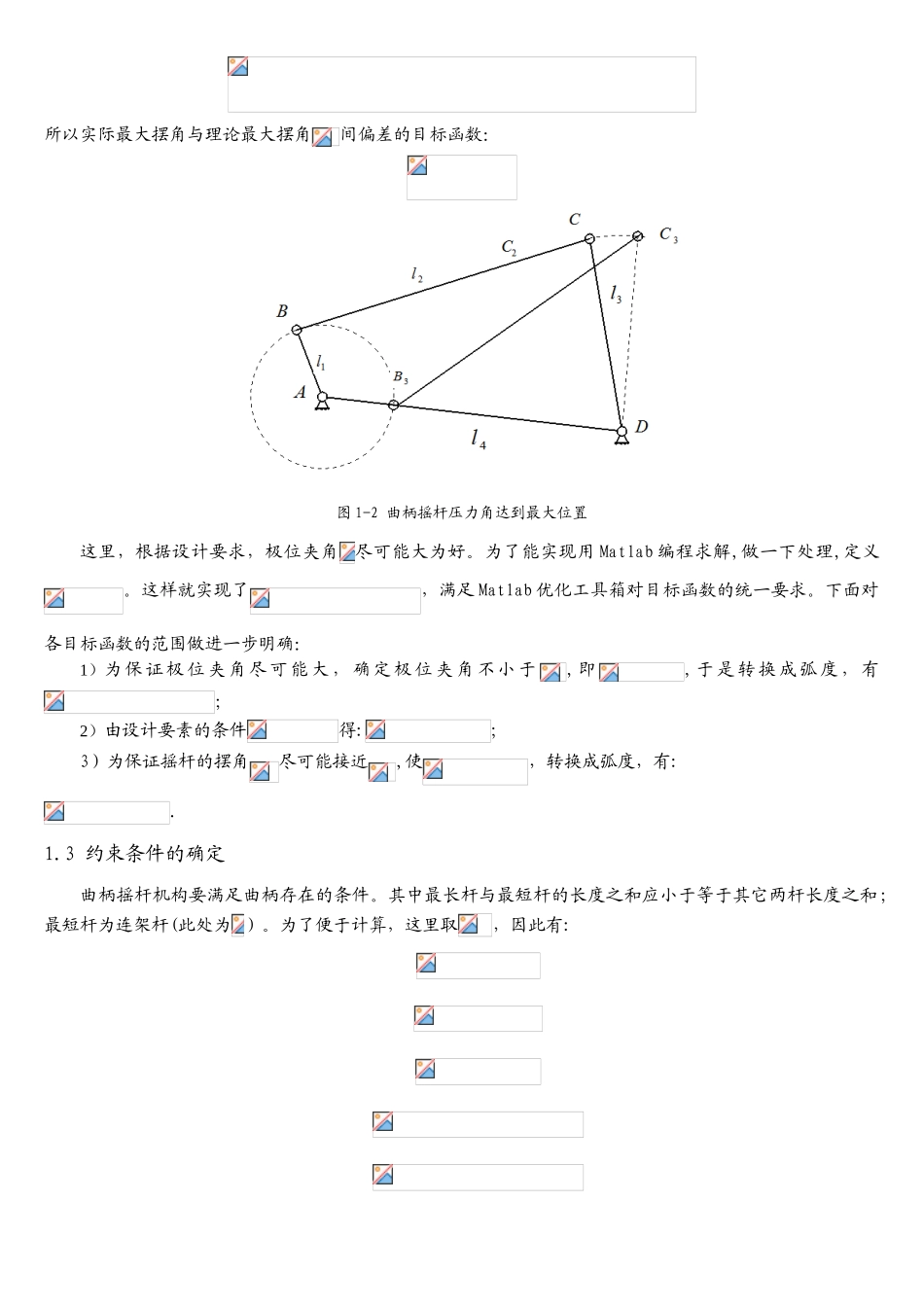
在这里,我们很容易知道当点位于 A 和 D 之间的这种情况,压力角最大(如图 1—2 所示)
故最大压力角的目标函数: 摇杆的实际最大摆角为,故所以实际最大摆角与理论最大摆角间偏差的目标函数:图 1-2 曲柄摇杆压力角达到最大位置这里,根据设计要求,极位夹角尽可能大为好
为了能实现用 Matlab 编程求解,做一下处理,定义
这样就实现了,满足 Matlab 优化工具箱对目标函数的统一要求
下面对各目标函数的范围做进一步明确:1)为 保 证 极 位 夹 角