基于 MATLAB 的曲柄滑块机构运动的仿真 摘要:本文在曲柄滑块机构运动简图的基础上,对其数学运动模型进行分析,用解析法计算曲柄的转角和角速度,及滑块的位移和速度,并用 MATLAB 软件进行仿真
1 引言在机械传动系统中,曲柄滑块机构是一种常用的机械机构,它将曲柄的转动转化为滑块在直线上的往复运动,是压气机、冲床、活塞式水泵等机械的主机构
这里用解析法,并用MATLAB 对其进行仿真
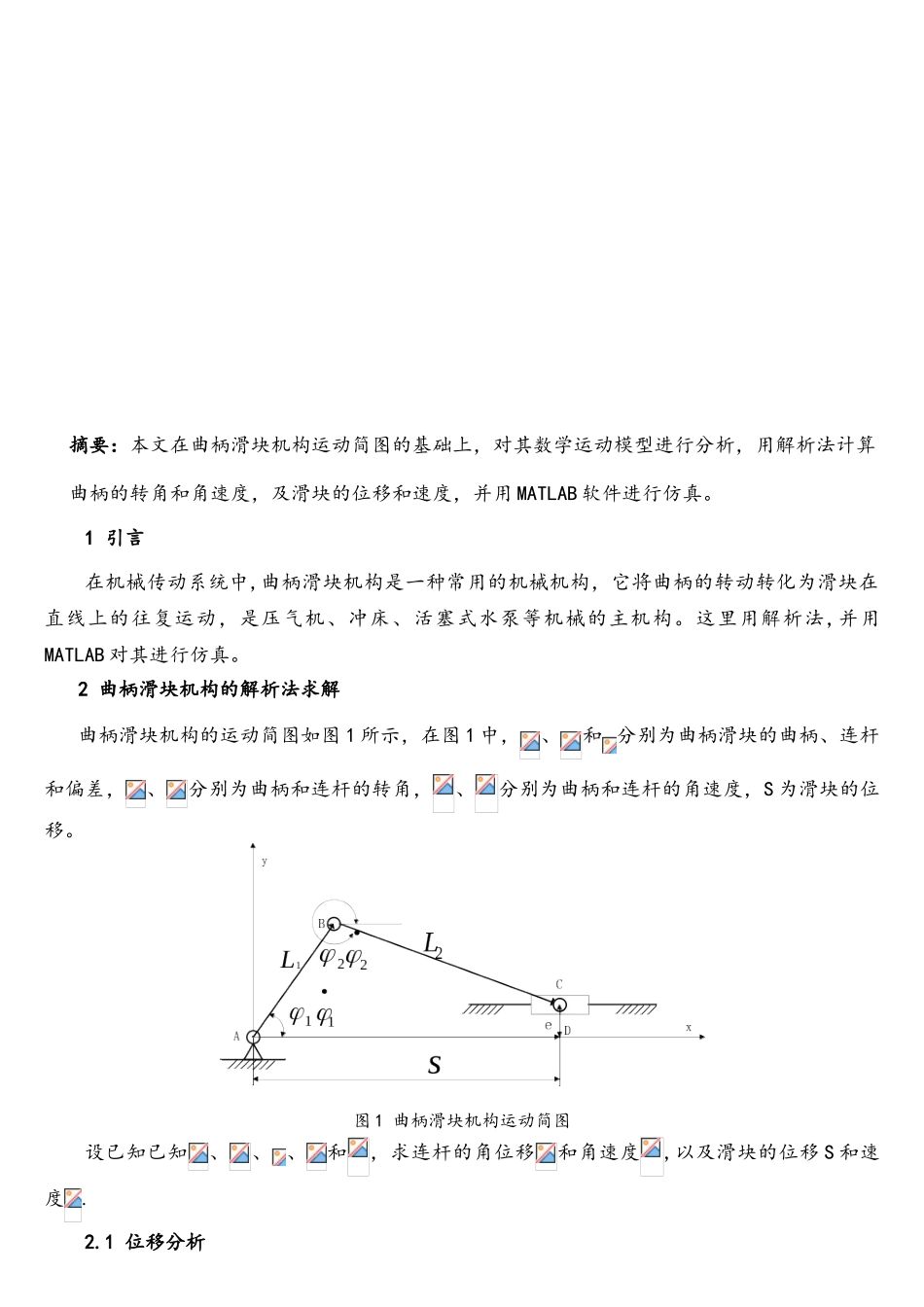
2 曲柄滑块机构的解析法求解曲柄滑块机构的运动简图如图 1 所示,在图 1 中,、和 分别为曲柄滑块的曲柄、连杆和偏差,、分别为曲柄和连杆的转角,、分别为曲柄和连杆的角速度,S 为滑块的位移
图 1 曲柄滑块机构运动简图设已知已知、、 、和,求连杆的角位移和角速度,以及滑块的位移 S 和速度
1 位移分析按图 1 中四边形 ABCD 的矢量方向有:将上式转化成幅值乘以角度的形式,得到如下等式: (1)分别取上式的虚部和实部,并在 e 前面乘 N,N 取值 1 或-1,用以表示滑块在 x 轴的上方或者下方,得到下面两式: (2) (3)整理上面两个公式得到 S 和的计算公式: (4) (5)2
2 速度分析将(1)式两边对时间求导得(6)式 (6)取(6)式的实部和虚部,整理得和的计算公式: (7) (8)根据(7)式和(8)式即可得到滑块的速度及连杆的角速度
3 实例分析及其 MATLAB 仿真2
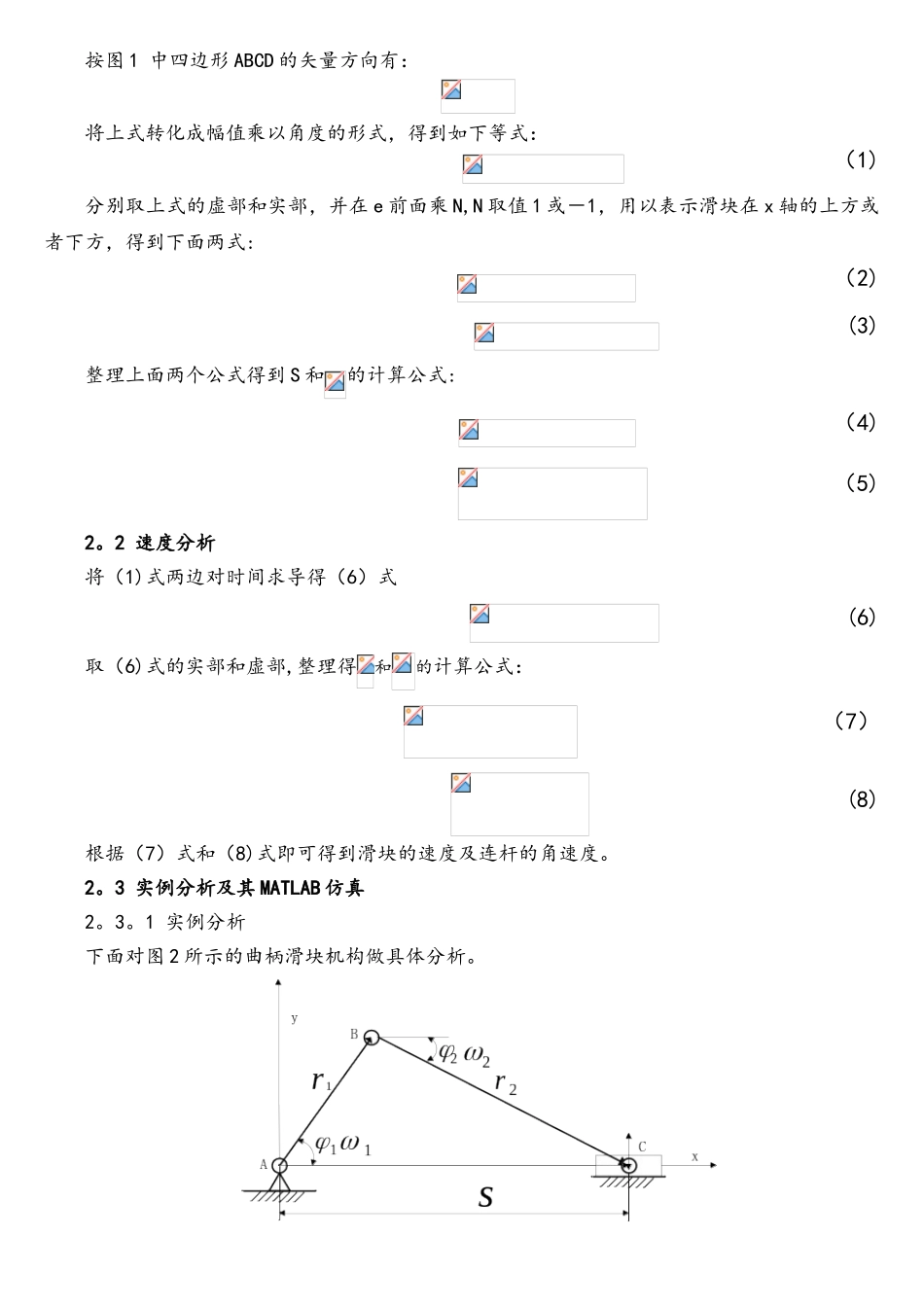
1 实例分析下面对图 2 所示的曲柄滑块机构做具体分析
图 2 曲柄滑块机构简图例中:,,求,,S 和
建立图示的封闭矢量方程: (9)将上式分解到 x 与 y 轴坐标上,得到: (11)得: (11)对(10)式对时间求导得: (12)将上式用矩阵形式表示,令: (13)则(12)可表示为:
从而可解出和
2 MATLAB 仿真Matlab 仿真程序如下:r1=36;%单位