现代控制理论第四次上机实验报告实验五 利用 MATLAB 求解极点配置问题实验目的:1、学习极点配置状态反馈控制器的设计算法; 2、通过编程、上机调试,掌握系统极点配置设计方法
实验步骤:1、极点配置状态反馈控制器的设计,采纳 MATLAB 的 m-文件编程; 2、在 MATLAB 界面下调试程序,并检查是否运行正确
实验要求:1、 在运行以上程序的基础上,针对状态空间模型为的被控对象设计状态反馈控制器,使得闭环极点为-4 和-5,并讨论闭环系统的稳态性能
先推断系统能控性:>> A = [0 1 ;-3 -4]; B = [0;1]; Tc=ctrb(A,B)n=size(A);if rank(Tc)==n(1) disp('The system is controlled')else disp('The system is not controlled')endTc = 0 1 1 -4The system is controlled再求状态反馈器:>> A = [0 1 ;-3 -4]; B = [0;1]; J = [-4 -5]; K = place(A,B,J)K = 17
0000 5
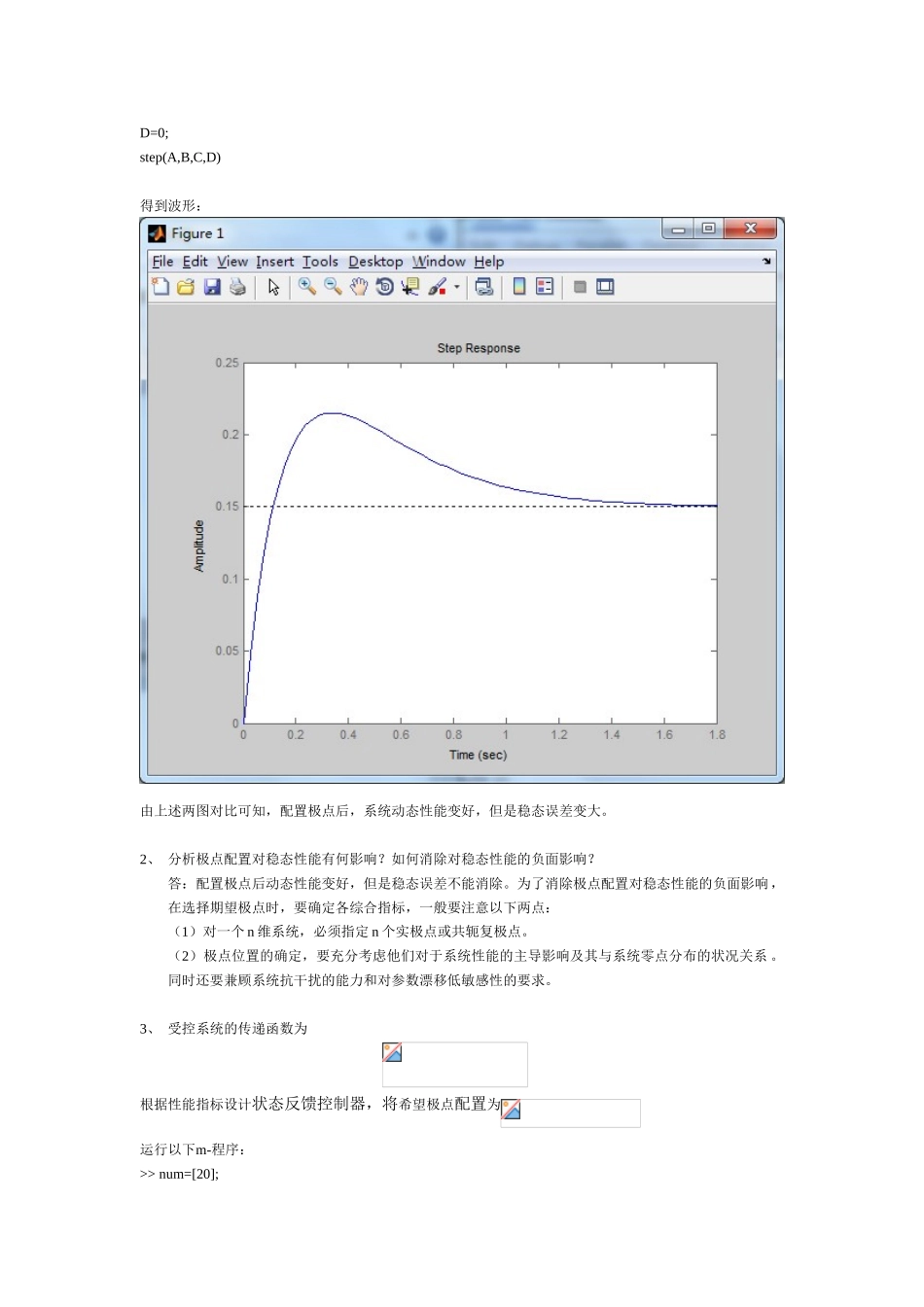
0000即状态反馈控制器为:状态反馈闭环系统状态空间表达式:A1=A-BK=[0 1;-20 -9]配置极点前:>> A=[0 1 ;-3 -4]; B=[0;1]; C=[3 2];D=0;step(A,B,C,D)得到波形:配置极点后:A 变为 A1>> A=[0 1 ;-20 -9]; B=[0;1]; C=[3 2];D=0;step(A,B,C,D)得到波形:由上述两图对比可知,配置极点后,系统动态性能变好,但是稳态误差变大
2、 分析极点配置对稳态性能有何影响
如何消除对稳态性能的负面影响
答:配置极点后动态性能变好,但是稳态误差不能消除
为了消除极点配置对稳态性能