计算机控制系统试题(A 卷) 分析说明或计算下列各题:1
画出计算机控制系统的方框图,并分别说明各单元的作用
(15分)2
写出数字 PID 位置型和增量型控制算法的计算式,并比较两种算法的优缺点
(15 分)3
在数字 PID 中,采样周期 T 的选择需要考虑哪些因素
(15 分)4
已知被控对象的传递函数,采样周期 T=0
1s,采纳零阶保持器,单位负反馈系统
要求针对单位阶跃输入信号设计最少拍无纹波系统的,并计算输出响应和控制信号序列
368)(15 分)5
被控对象的脉冲传函,采样周期T=1s,试用达林算法设计 τ=2s 的,对于单位阶跃输入的数字控制器 D(z),并计算输出响应和控制信号序列
607)(15 分)6
动态矩阵控制算法为何只能适用于渐近稳定的对象
对模型时域长度 N 有什么要求
若 N 取得太小会有什么问题
(10 分)7
说明计算机控制网络的特点以及控制网络与信息网络的区别
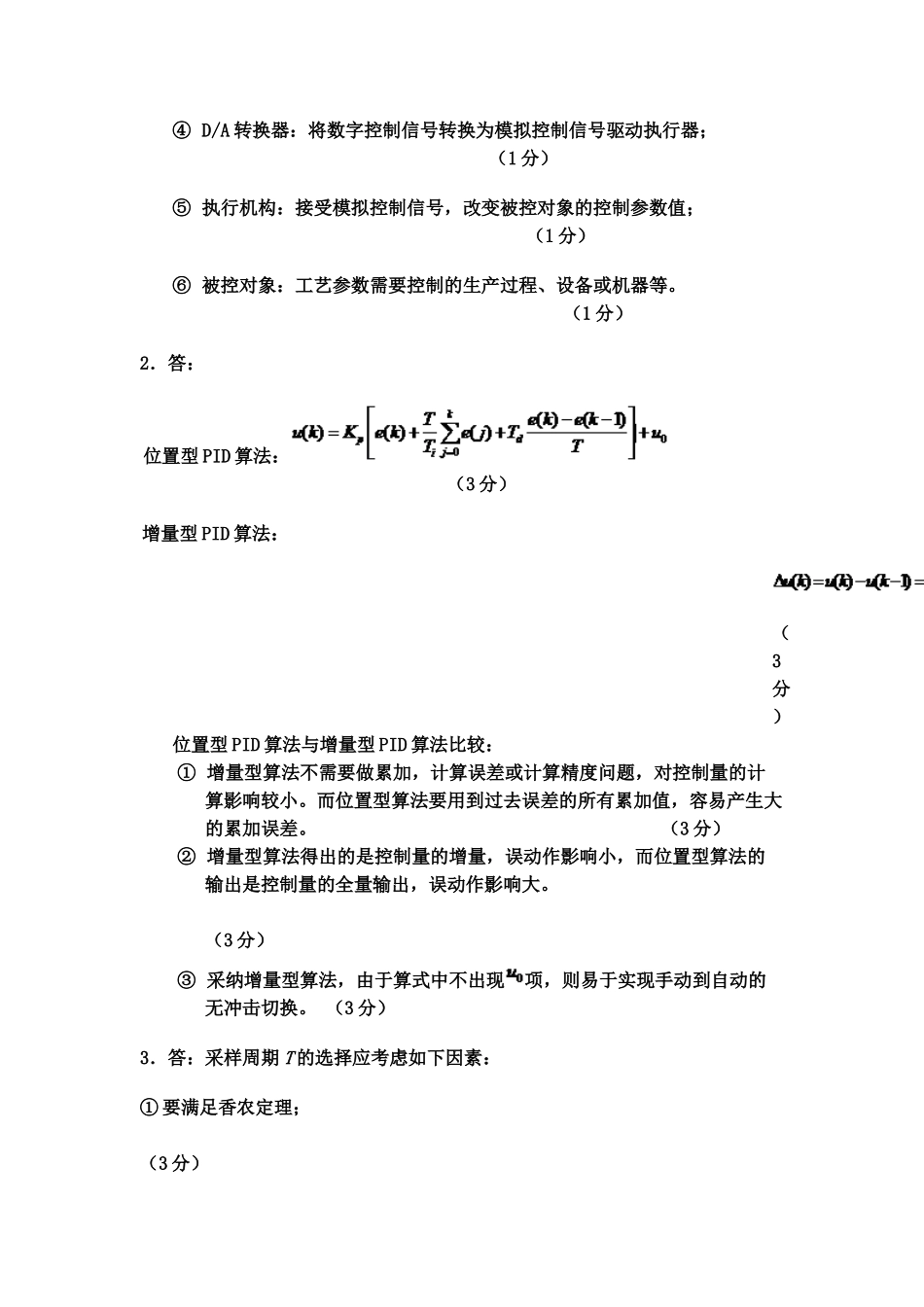
(15 分) 附录 常用 Z 变换表拉氏变换 F(s)时域函数 f(t)Z 变换 F(z)1δ(t)1δ(t-kT)1(t)t 计算机控制系统试题答案(A 卷)1.答:计算机控制系统的基本框图如下: (8 分)① 测量变送器:测量被控对象的控制参数,并变换成一定形式的电信号; (1 分)② A/D 转换器:将电信号转换成数字信号反馈给计算机; (1 分)③ 控制器:将反馈信号与给定值信号进行比较,得到的偏差信号根据一定的控制算法输出数字控制信号; (2 分)④ D/A 转换器:将数字控制信号转换为模拟控制信号驱动执行器; (1 分)⑤ 执行机构:接受模拟控制信号,改变被控对象的控制参数值; (1 分)⑥ 被控对象:工艺参数需要控制的生产过程、设备或机器等
(1 分)2.答: 位置型 PID 算法: (3 分)增量型 PID 算法: (3分)位置型