步进电机驱动及控制技术解答1
步进电机为什么要配步进电机驱动器才能工作
步进电机作为一种控制精密位移及大范围调速专用的电机, 它的旋转是以自身固有的步距角角(转子与定子的机械结构所决定)一步一步运行的, 其特点是每旋转一步,步距角始终不变,能够保持精密准确的位置
所以无论旋转多少次,始终没有积累误差
由于控制方法简单,成本低廉,广泛应用于各种开环控制
步进电机的运行需要有脉冲分配的功率型电子装置进行驱动, 这就是步进电机驱动器
它接收控制系统发出的脉冲信号,根据步进电机的结构特点,顺序分配脉冲,实现控制角位移、旋转速度、旋转方向、制动加载状态、自由状态
控制系统每发一个脉冲信号, 通过驱动器就能够驱动步进电机旋转一个步距角
步进电机的转速与脉冲信号的频率成正比
角位移量与脉冲个数相关
步进电机停止旋转时,能够产生两种状态:制动加载能够产生最大或部分保持转矩(通常称为刹车保持,无需电磁制动或机械制动)及转子处于自由状态(能够被外部推力带动轻松旋转)
步进电机驱动器,必须与步进电机的型号相匹配
否则,将会损坏步进电机及驱动器
什么是驱动器的细分
运行拍数与步距角是什么关系
“细分”是针对“步距角”而言的
没有细分状态,控制系统每发一个步进脉冲信号,步进电机就根据整步旋转一个特定的角度
步进电机的参数,都会给出一个步距角的值
如 110BYG250A 型电机给出的值为 0
8°(表示半步工作时为 0
9°、整步工作时为 1
8°),这是步进电机固有步距角
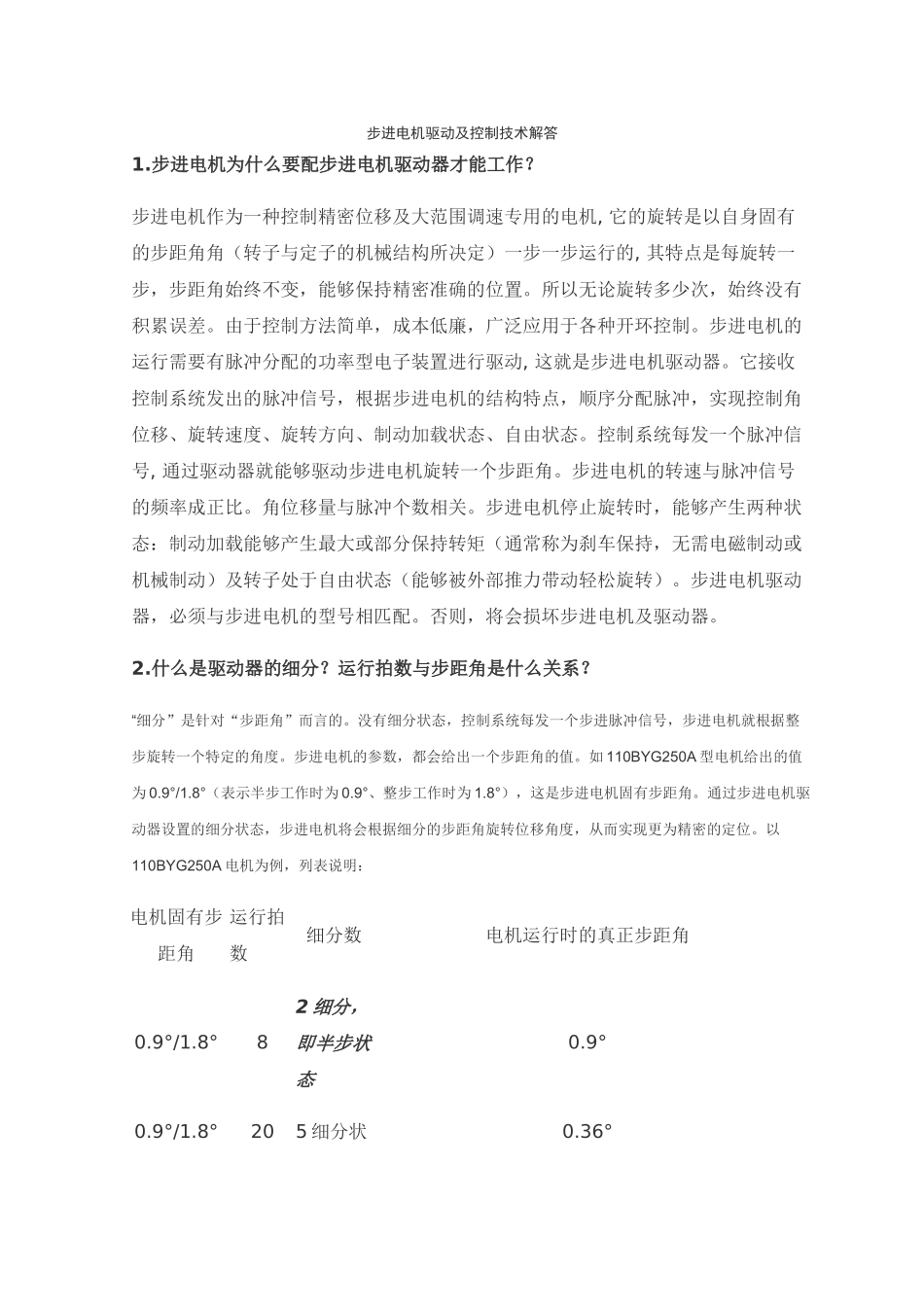
通过步进电机驱动器设置的细分状态,步进电机将会根据细分的步距角旋转位移角度,从而实现更为精密的定位
以110BYG250A 电机为例,列表说明:电机固有步距角运行拍数细分数电机运行时的真正步距角0
8°82 细分,即半步状态0
8°205 细分状0
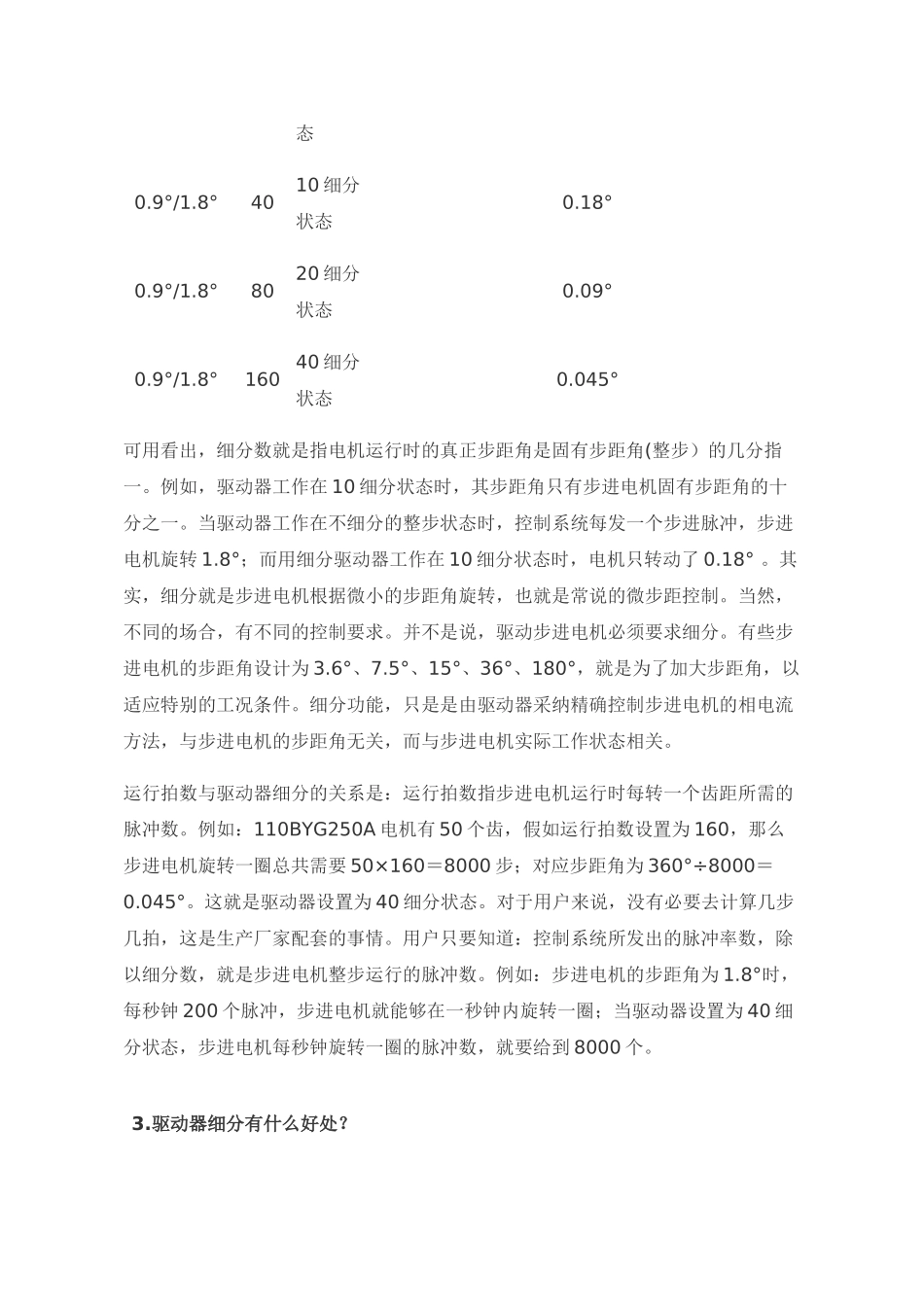
8°4010 细