机器人制作与创新制作五接力机器人一、任务描述场地上有机器人跑道,跑道两侧有黑色轨迹,接力区为黑色区域
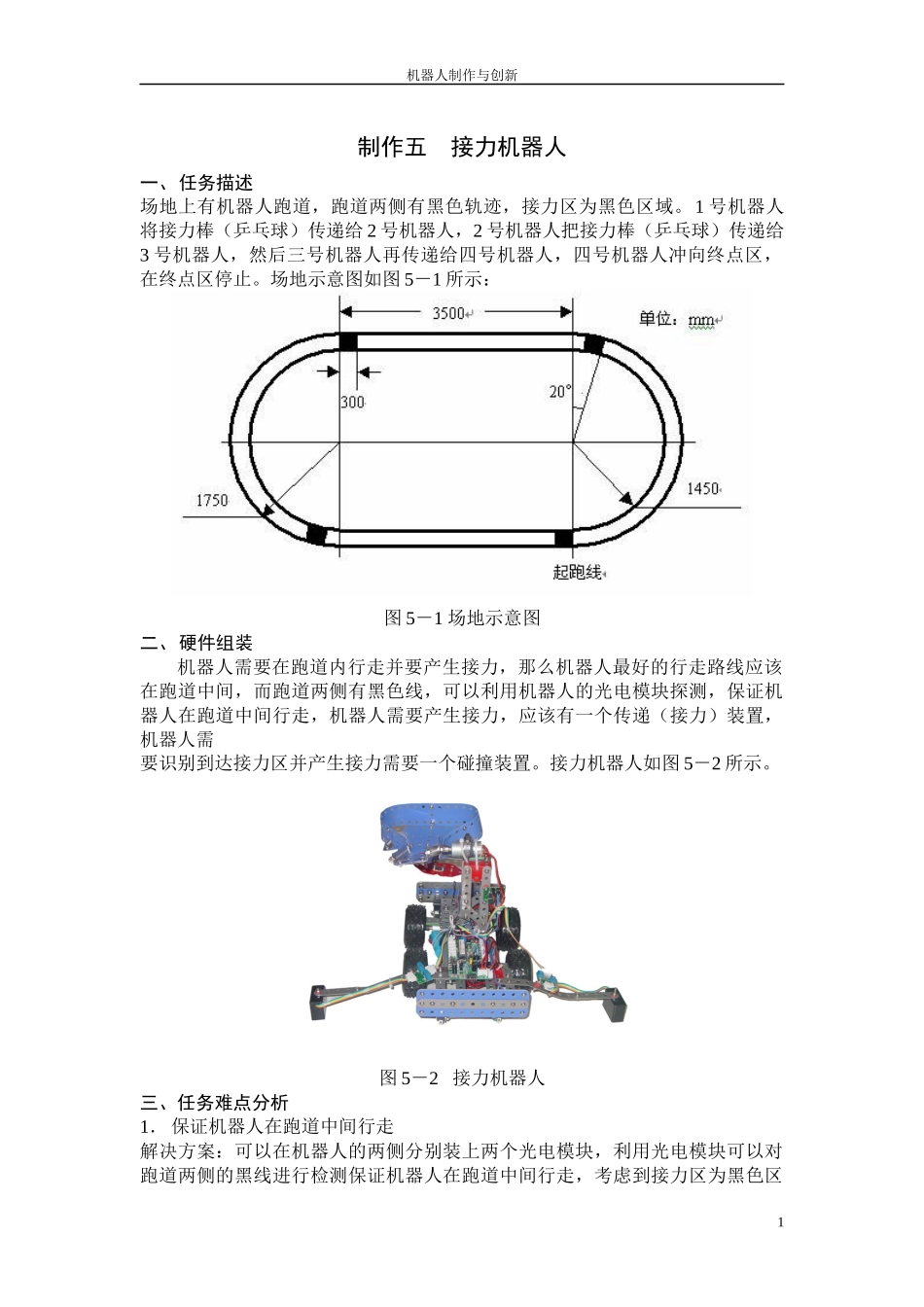
1号机器人将接力棒(乒乓球)传递给2号机器人,2号机器人把接力棒(乒乓球)传递给3号机器人,然后三号机器人再传递给四号机器人,四号机器人冲向终点区,在终点区停止
场地示意图如图5-1所示:图5-1场地示意图二、硬件组装机器人需要在跑道内行走并要产生接力,那么机器人最好的行走路线应该在跑道中间,而跑道两侧有黑色线,可以利用机器人的光电模块探测,保证机器人在跑道中间行走,机器人需要产生接力,应该有一个传递(接力)装置,机器人需要识别到达接力区并产生接力需要一个碰撞装置
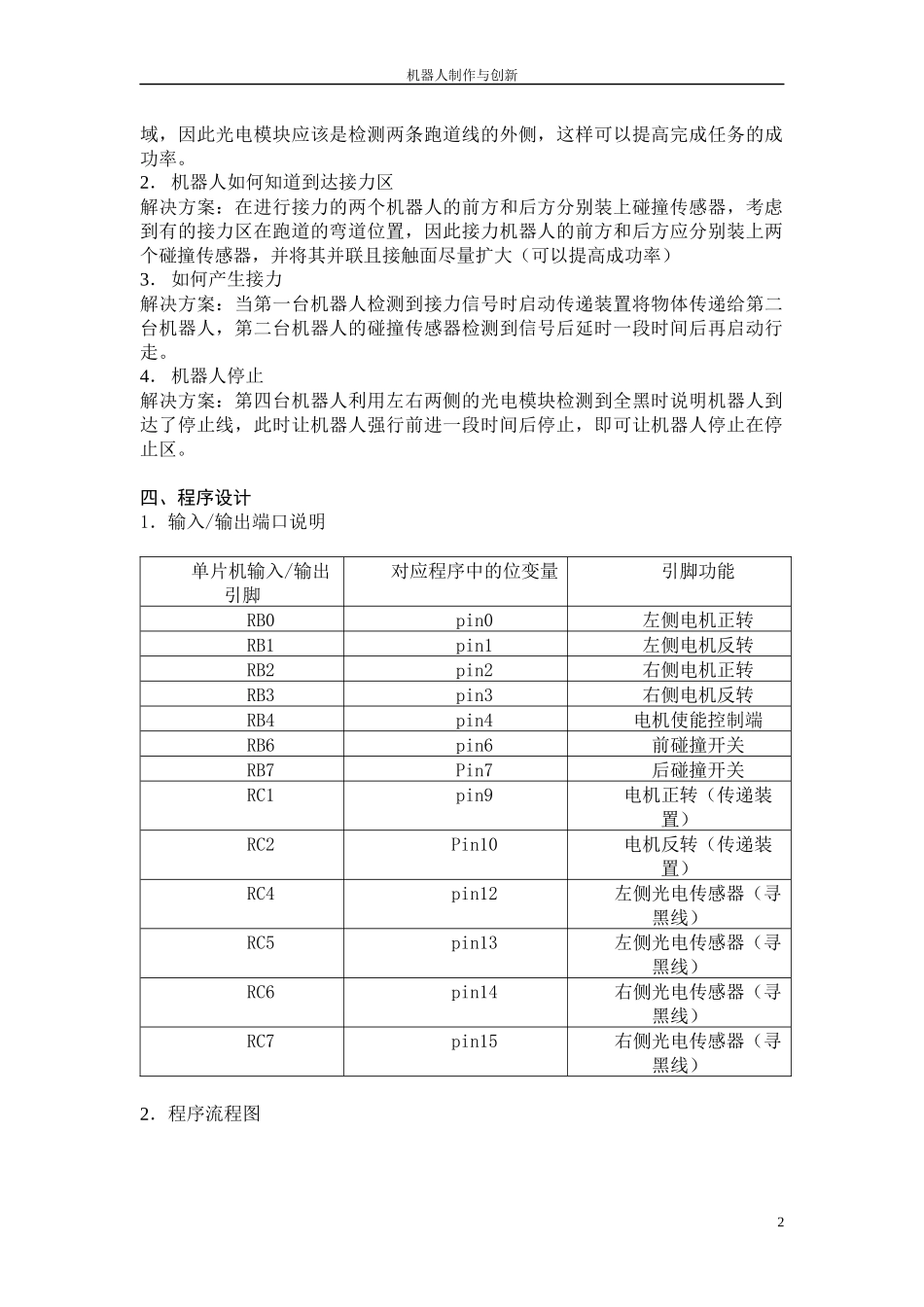
接力机器人如图5-2所示
图5-2接力机器人三、任务难点分析1.保证机器人在跑道中间行走解决方案:可以在机器人的两侧分别装上两个光电模块,利用光电模块可以对跑道两侧的黑线进行检测保证机器人在跑道中间行走,考虑到接力区为黑色区1机器人制作与创新域,因此光电模块应该是检测两条跑道线的外侧,这样可以提高完成任务的成功率
2.机器人如何知道到达接力区解决方案:在进行接力的两个机器人的前方和后方分别装上碰撞传感器,考虑到有的接力区在跑道的弯道位置,因此接力机器人的前方和后方应分别装上两个碰撞传感器,并将其并联且接触面尽量扩大(可以提高成功率)3.如何产生接力解决方案:当第一台机器人检测到接力信号时启动传递装置将物体传递给第二台机器人,第二台机器人的碰撞传感器检测到信号后延时一段时间后再启动行走
4.机器人停止解决方案:第四台机器人利用左右两侧的光电模块检测到全黑时说明机器人到达了停止线,此时让机器人强行前进一段时间后停止,即可让机器人停止在停止区
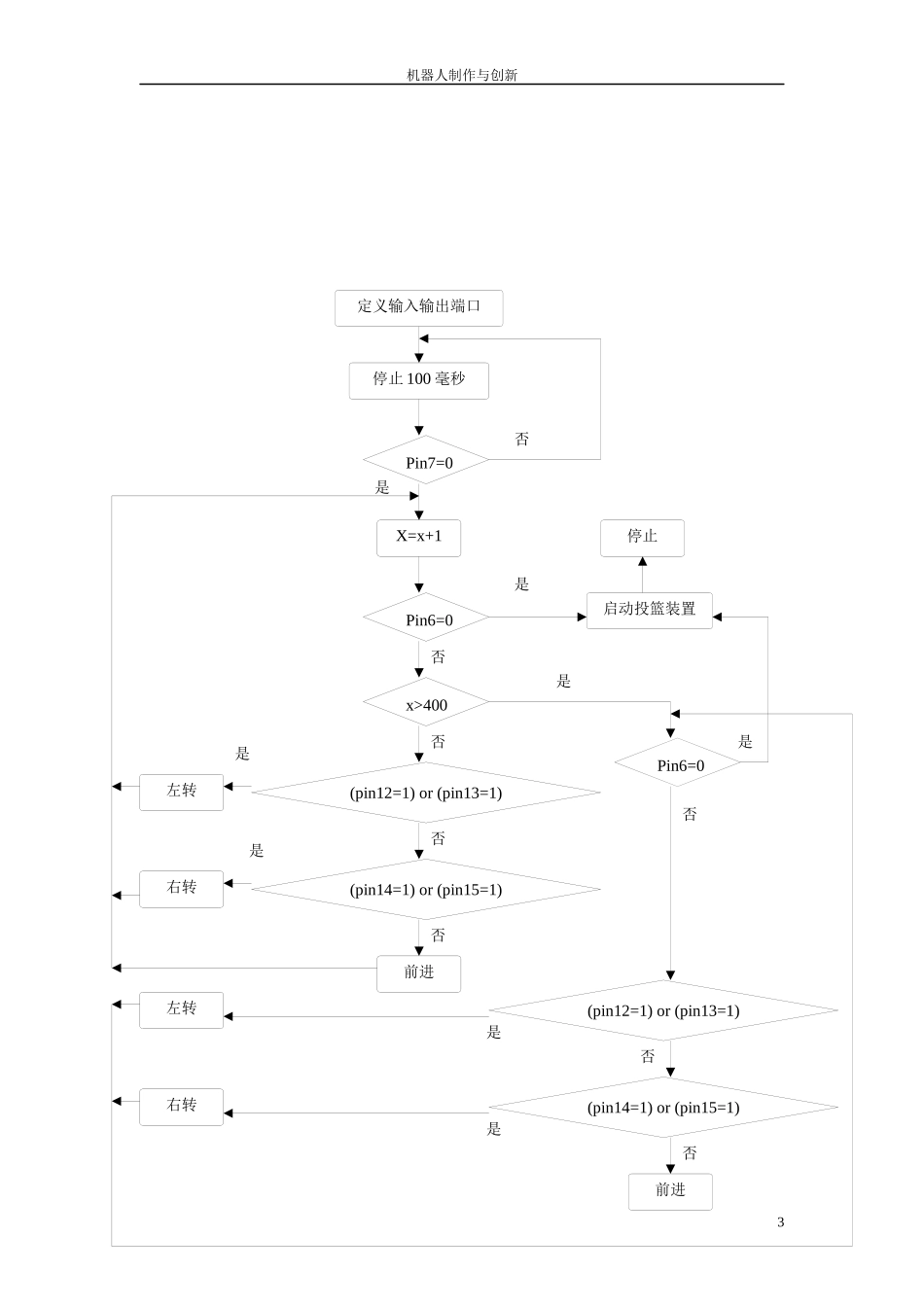
四、程序设计1.输入/输出端口说明单片机输入/输出引脚对应程序中的位变量引脚功能RB0pin0左侧电机正转RB1pin1左侧电机反转RB2pin2右侧电机正转RB3pin3右侧电