基于单片机的船舶辅助锅炉智能控制系统目前,国内多数船舶的机舱服务设备仍采用大量的继电器、接触器、时间继电器组成,实现各种控制功能,它们的共同特点是线路复杂、可靠性差、有时容易出现误动作,特别是触头氧化及铁芯与衔铁弄脏后的吸力不足,机械运动部件运动不灵活而出现被卡烧坏线圈等故障,给维护过程带来极大不便,甚至会影响正常营运工作,而且,这种设备体积大、重量重、价格贵
因此采用先进的设计思想对船用控制系统进行全新设计尤为必要
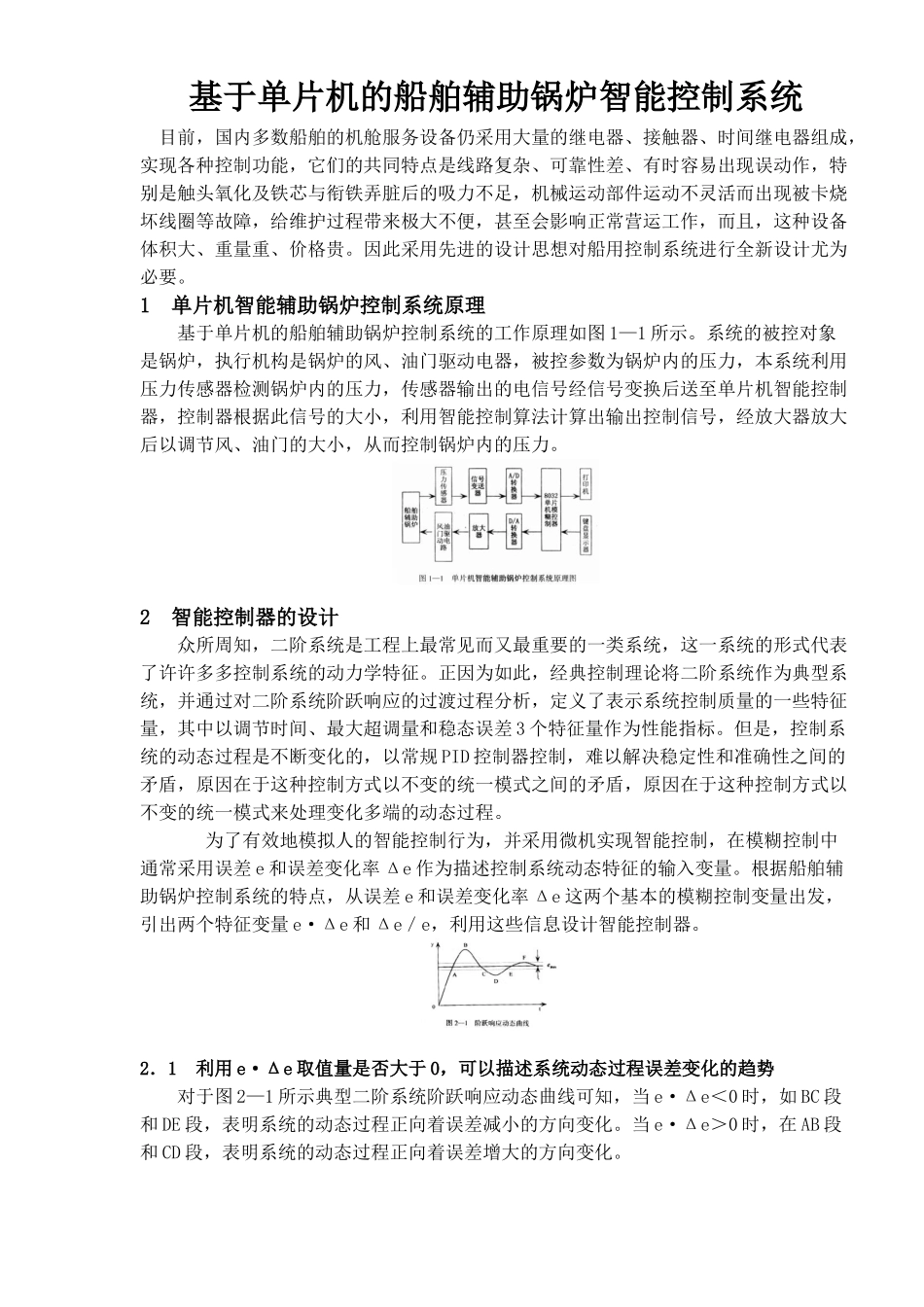
1单片机智能辅助锅炉控制系统原理基于单片机的船舶辅助锅炉控制系统的工作原理如图1—1所示
系统的被控对象是锅炉,执行机构是锅炉的风、油门驱动电器,被控参数为锅炉内的压力,本系统利用压力传感器检测锅炉内的压力,传感器输出的电信号经信号变换后送至单片机智能控制器,控制器根据此信号的大小,利用智能控制算法计算出输出控制信号,经放大器放大后以调节风、油门的大小,从而控制锅炉内的压力
2智能控制器的设计众所周知,二阶系统是工程上最常见而又最重要的一类系统,这一系统的形式代表了许许多多控制系统的动力学特征
正因为如此,经典控制理论将二阶系统作为典型系统,并通过对二阶系统阶跃响应的过渡过程分析,定义了表示系统控制质量的一些特征量,其中以调节时间、最大超调量和稳态误差3个特征量作为性能指标
但是,控制系统的动态过程是不断变化的,以常规PID控制器控制,难以解决稳定性和准确性之间的矛盾,原因在于这种控制方式以不变的统一模式之间的矛盾,原因在于这种控制方式以不变的统一模式来处理变化多端的动态过程
为了有效地模拟人的智能控制行为,并采用微机实现智能控制,在模糊控制中通常采用误差e和误差变化率Δe作为描述控制系统动态特征的输入变量
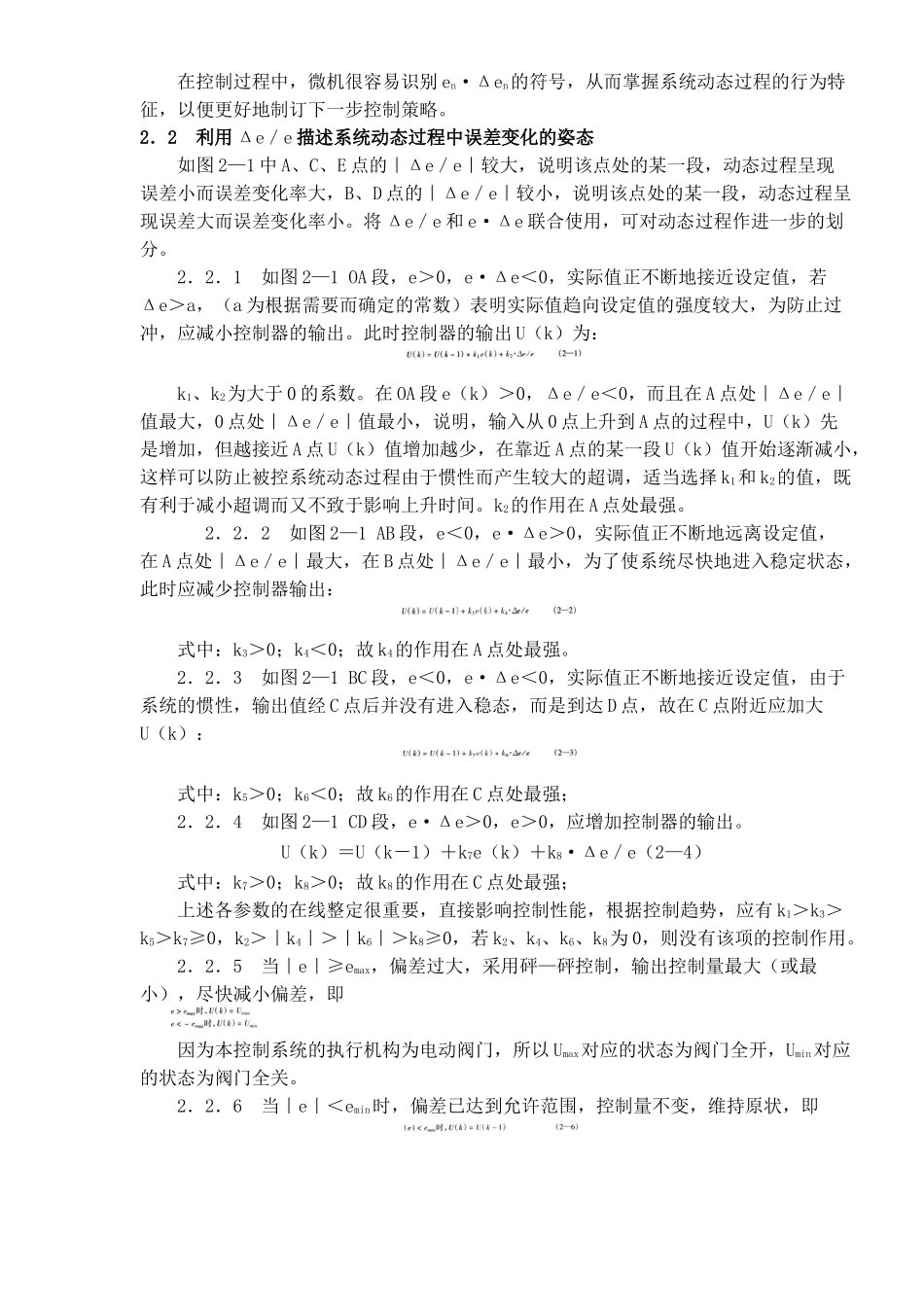
根据船舶辅助锅炉控制系统的特点,从误差e和误差变化率Δe这两个基本的模糊控制变量出发,引出两个特征变量e·Δe和Δe/e,利用这些信息设计智能控制器