1简述工业机器人的定义,说明机器人的主要特征
2工业机器人与数控机床有什么区别
3工业机器人与外界环境有什么关系
4说明工业机器人的基本组成及三大部分之间的关系
5简述下面几个术语的含义:自由度、重复定位精度、工作原理、工作速度、承载能力
6什么叫冗余自由度机器人
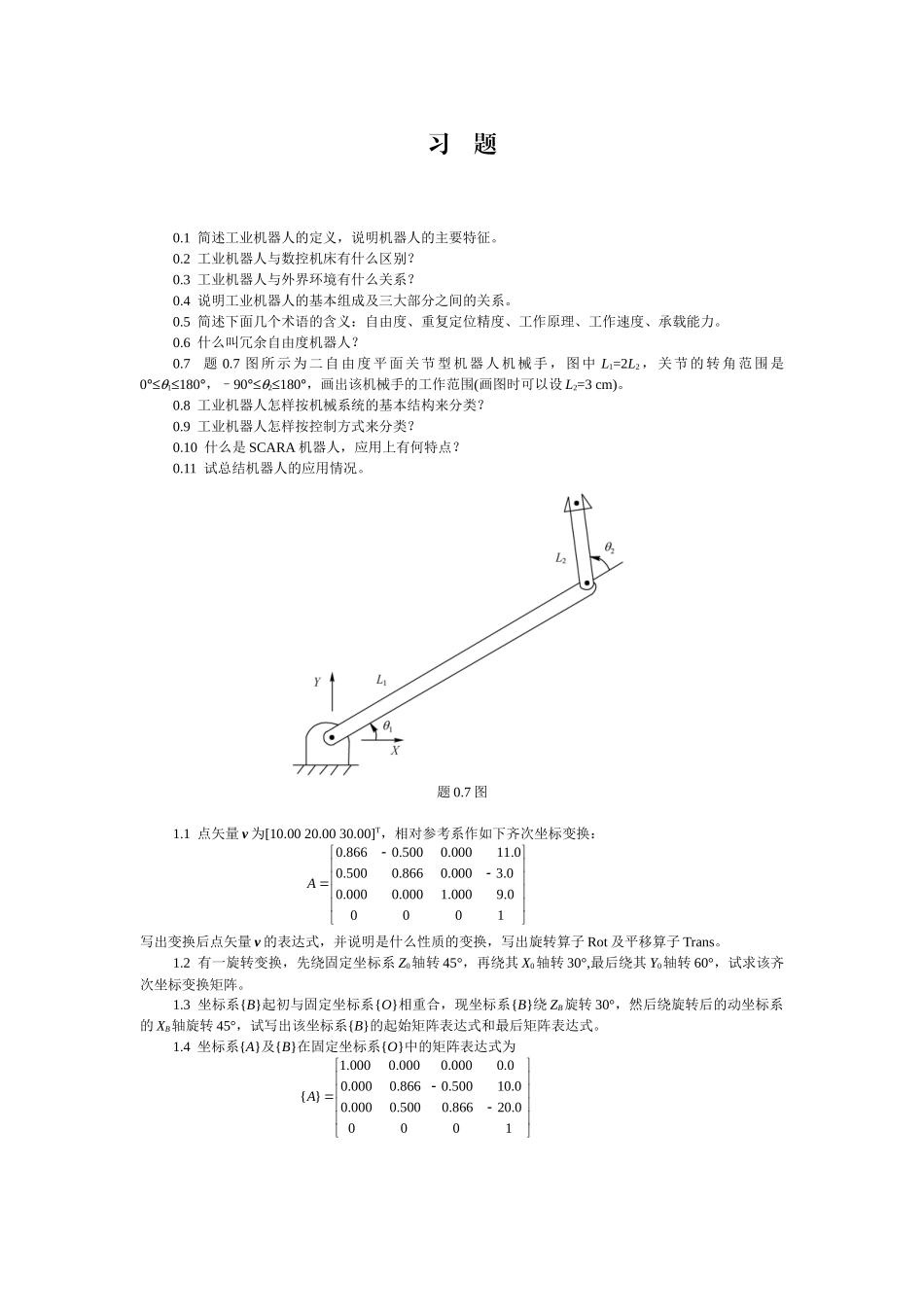
7图所示为二自由度平面关节型机器人机械手,图中L1=2L2,关节的转角范围是0°£q1£180°,–90°£q2£180°,画出该机械手的工作范围(画图时可以设L2=3cm)
8工业机器人怎样按机械系统的基本结构来分类
9工业机器人怎样按控制方式来分类
10什么是SCARA机器人,应用上有何特点
11试总结机器人的应用情况
1点矢量v为[10
00]T,相对参考系作如下齐次坐标变换:写出变换后点矢量v的表达式,并说明是什么性质的变换,写出旋转算子Rot及平移算子Trans
2有一旋转变换,先绕固定坐标系Z0轴转45°,再绕其X0轴转30°,最后绕其Y0轴转60°,试求该齐次坐标变换矩阵
3坐标系{B}起初与固定坐标系{O}相重合,现坐标系{B}绕ZB旋转30°,然后绕旋转后的动坐标系的XB轴旋转45°,试写出该坐标系{B}的起始矩阵表达式和最后矩阵表达式
4坐标系{A}及{B}在固定坐标系{O}中的矩阵表达式为0
00001A1
00001A画出它们在{O}坐标系中的位置和姿态:1
5写出齐次变换矩阵,它表示坐标系{B}连续相对固定坐标系{A}