AUTOMAN-1型智能机器人使用说明书AUTOMAN-1型智能机器人由四大部分组成
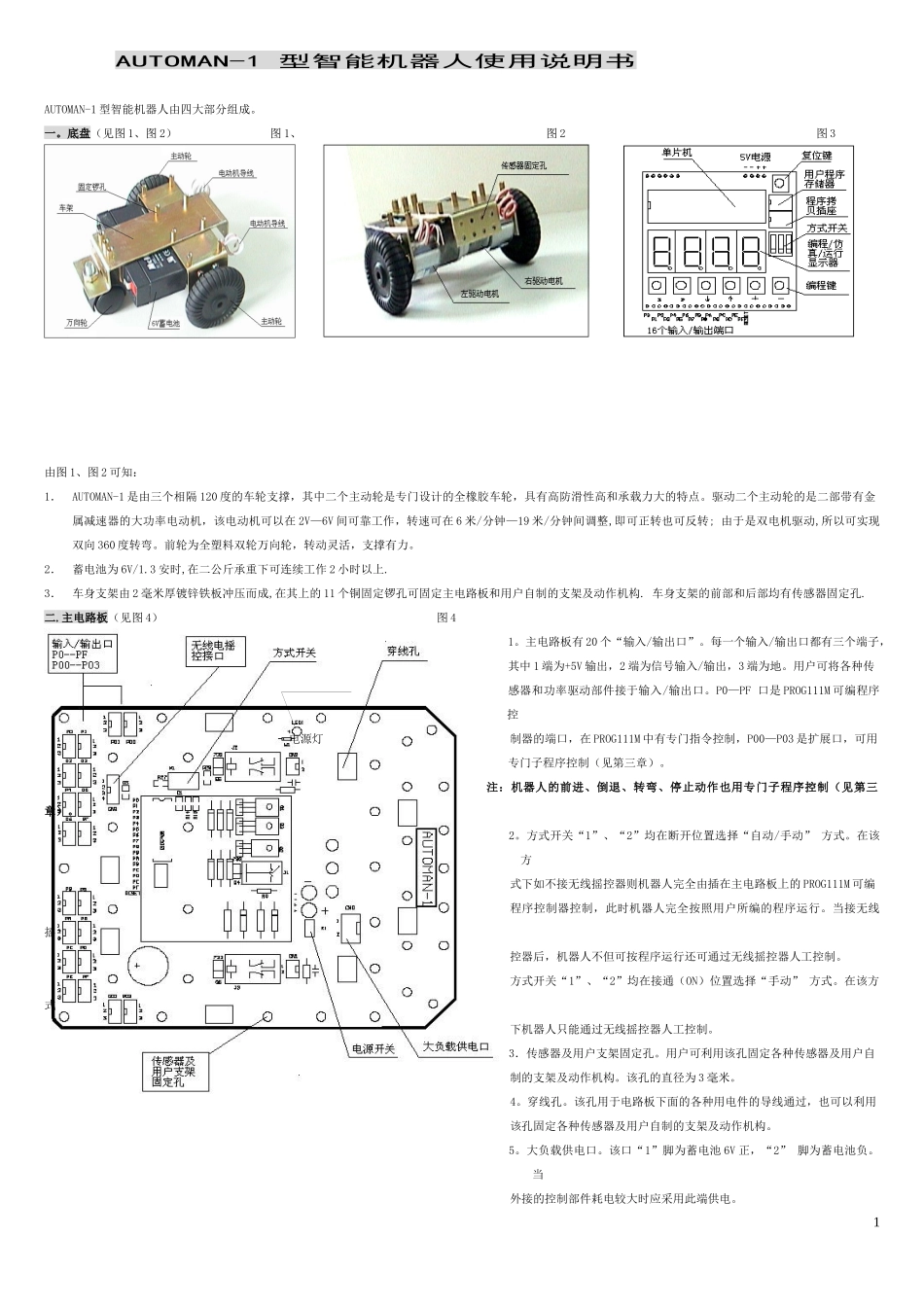
底盘(见图1、图2)图1、图2图3由图1、图2可知:1.AUTOMAN-1是由三个相隔120度的车轮支撑,其中二个主动轮是专门设计的全橡胶车轮,具有高防滑性高和承载力大的特点
驱动二个主动轮的是二部带有金属减速器的大功率电动机,该电动机可以在2V—6V间可靠工作,转速可在6米/分钟—19米/分钟间调整,即可正转也可反转;由于是双电机驱动,所以可实现双向360度转弯
前轮为全塑料双轮万向轮,转动灵活,支撑有力
2.蓄电池为6V/1
3安时,在二公斤承重下可连续工作2小时以上
3.车身支架由2毫米厚镀锌铁板冲压而成,在其上的11个铜固定锣孔可固定主电路板和用户自制的支架及动作机构
车身支架的前部和后部均有传感器固定孔
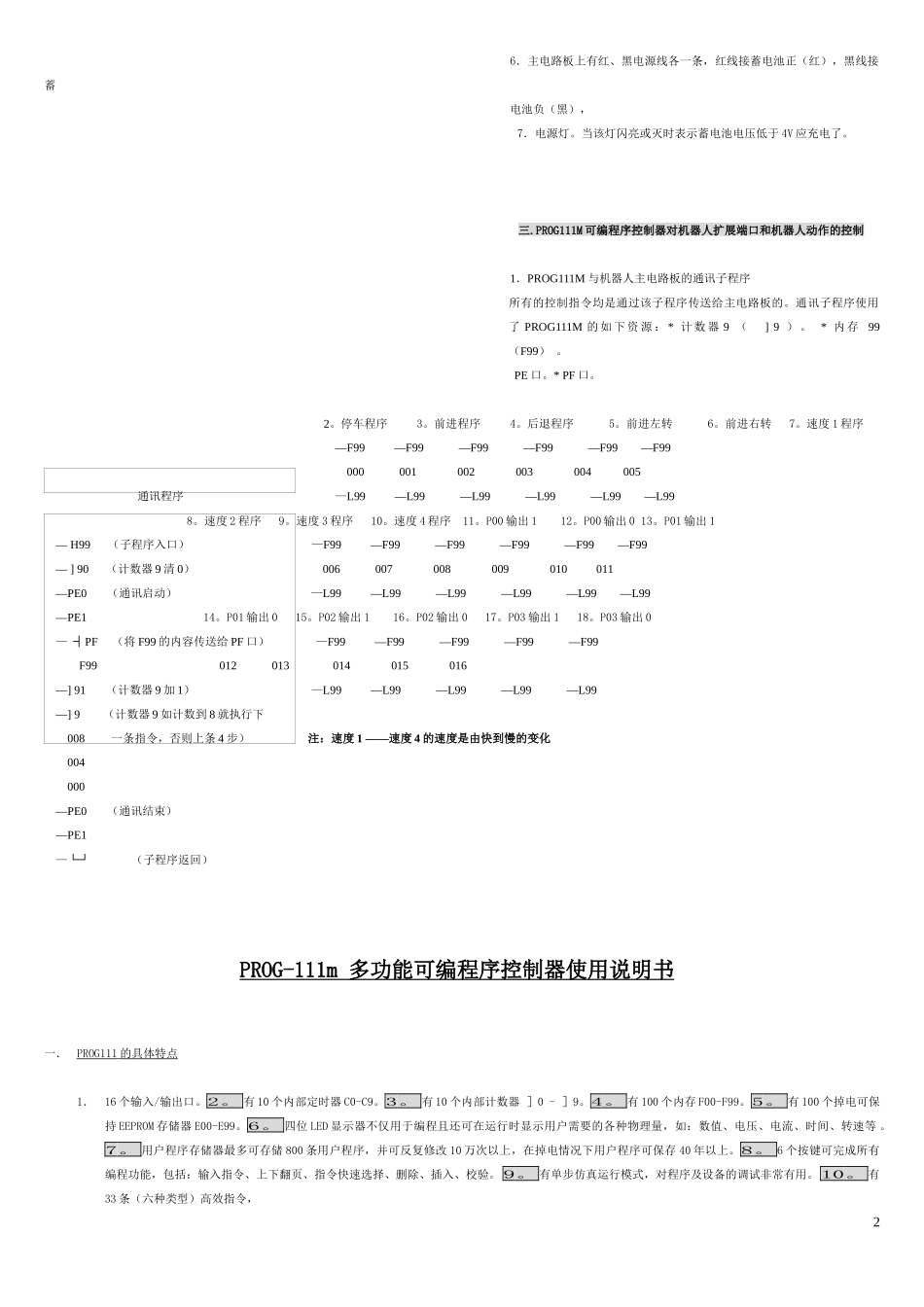
主电路板(见图4)图41
主电路板有20个“输入/输出口”
每一个输入/输出口都有三个端子,其中1端为+5V输出,2端为信号输入/输出,3端为地
用户可将各种传感器和功率驱动部件接于输入/输出口
P0—PF口是PROG111M可编程序控电源灯制器的端口,在PROG111M中有专门指令控制,P00—P03是扩展口,可用专门子程序控制(见第三章)
注:机器人的前进、倒退、转弯、停止动作也用专门子程序控制(见第三章)
方式开关“1”、“2”均在断开位置选择“自动/手动”方式
在该方式下如不接无线摇控器则机器人完全由插在主电路板上的PROG111M可编程序控制器控制,此时机器人完全按照用户所编的程序运行
当接无线摇控器后,机器人不但可按程序运行还可通过无线摇控器人工控制
方式开关“1”、“2”均在接通(ON)位置选择“手动”方式
在该方式下机器人只能通过无线摇控器人工控制
3.传感器及用户支架固定孔
用户可利用该孔固定各种传感器及用户自制的支架及动作机构
该孔的直径为3毫米