无线网络音视频采集机器人平台比赛编号:A377日期:2007-1-6单位:南京大学电子科学与工程系参赛者情况:(1)姓名:刘虎职业:在校本科生(2)姓名:李圣红职业:在校本科生(3)姓名:陈烨职业:在校本科生(4)姓名:王玉龙职业:在校本科生(5)姓名:周春城职业:在校本科生联系方式:姓名:刘虎电话:13921429383地址:江苏省南京市南京大学浦口校区8栋2单元103邮箱:liu_hu@126
com1【摘要】在现实生活与生产领域,经常需要一种机器人能够代替人类在复杂环境下从事劳动,如灾难搜救、危险场所作业以及狭小空间内的勘探等,这种机器人一般要求体积小、重量轻,具有行走功能和感知功能,并且能够远程遥控
本方案基于st-arm7嵌入式系统、CMOS图象传感器和无线传输技术,可以实现一个遥控机器人,通过遥控采集目标图象和声音,并实时传回至PC机显示
同时我们可以通过pc机对机器人进行实时控制
系统具有如下特点:(1)实时传回目标处的图象声音信息,便于及时作出判断和决策(2)体积小巧,可遥控到达如中央空调通气道等狭小空间内(3)控制和图象显示端采用普通PC机,无需额外成本(4)通过扩展增加作业机构可以实现遥控作业,如排爆等【关键词】CMOS图象传感器、arm嵌入式系统、无线传输,遥控机器人系统方案:一、概述系统主要由移动机器人终端和PC机控制终端两部分组成,机器人终端实时采集目标的图象信息,通过无线网络传回PC机终端,PC机终端将图象信息显示在LCD上;同时可以通过PC机终端向机器人发出指令控制其运动,可以用于矿难搜救、排爆以及中央空调通风管道的检测、清洁等
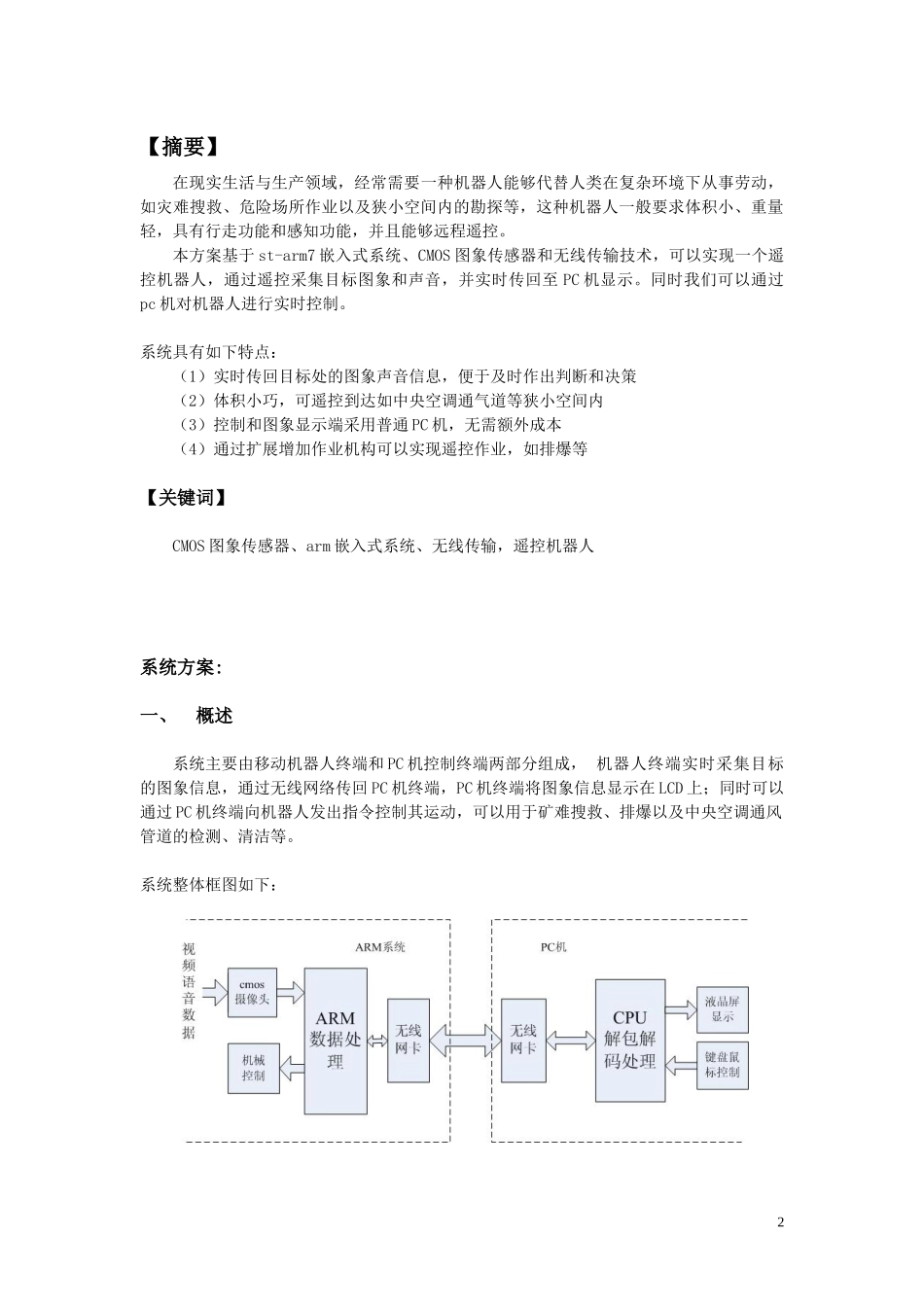
系统整体框图如下:2机器人终端和PC机终端通过无线网络互连,建立全双工通信,机器人终端往PC机端传送图象信息,PC机端往机器人端传送运动控制信号
机器人终端主要由图象采集、数据处理、无线传输和伺服机构控制4个模块组成,