乐高机器人教程4默认分类2008-06-2421:56:39阅读1383评论1字号:大中小订阅认识传感器本章所包含的内容:n触动传感器n光电传感器n角度传感器n温度传感器n传感器的使用方法与技巧n其他传感器4
1简介马达通过齿轮和滑轮传动,可以让你搭建的机器人动起来,他们就如同是移动机器人腿和手臂的肌肉
同时,你还可以使用传感器来装备你的机器人,它们就如同是机器人的眼睛、耳朵和手指
机器人套装中包含两种传感器:触动传感器(两种)和光电传感器
在本章中,我们主要是描述它们的特性,对于其它的传感器你可以单独购买,如:角度传感器和温度传感器
每一个设备都有其特定的作用,你将会因为它们的功能强大和所能涉及的范围之广而感到惊讶
当然也包括这种情况,可以用一种传感器仿效另一种传感器,以用来代替不能使用的传感器
利用RCX上的红外光电,使用一些小技巧,你可以把把你的光电传感器变成一个雷达
在阅读本章的过程中,我们希望你能把机器人套装放在身边,这样你可以跟随我们的例子亲自动手去做
为了保持其完整性,我们还会讲一些机器人套装的扩展套装和技术套装的内容
若你现在还没有这些也不要担心,这不会影响到你搭建体积较大的机器人
2触动传感器触动传感器(图4
1)是乐高传感器大家庭中最简单、最直观的一种
它的工作方式非常像是你家门铃上的按钮:当它被按下时,电路接通,电流就会通过,RCX就能够检测到这个数据流,你的程序就会读取触动传感器的当前状态:开或者关
1触动传感器如果你已经开始使用机器人套装,阅读了Constructopedia,并搭建了一些模型,你可能对传感器的一般用途比较熟悉,如缓冲器
缓冲器是与周围环境相互作用的一种简单方式,当你的机器人遇到障碍物时,可以用它们来进行检测,并由此而改变运动状态
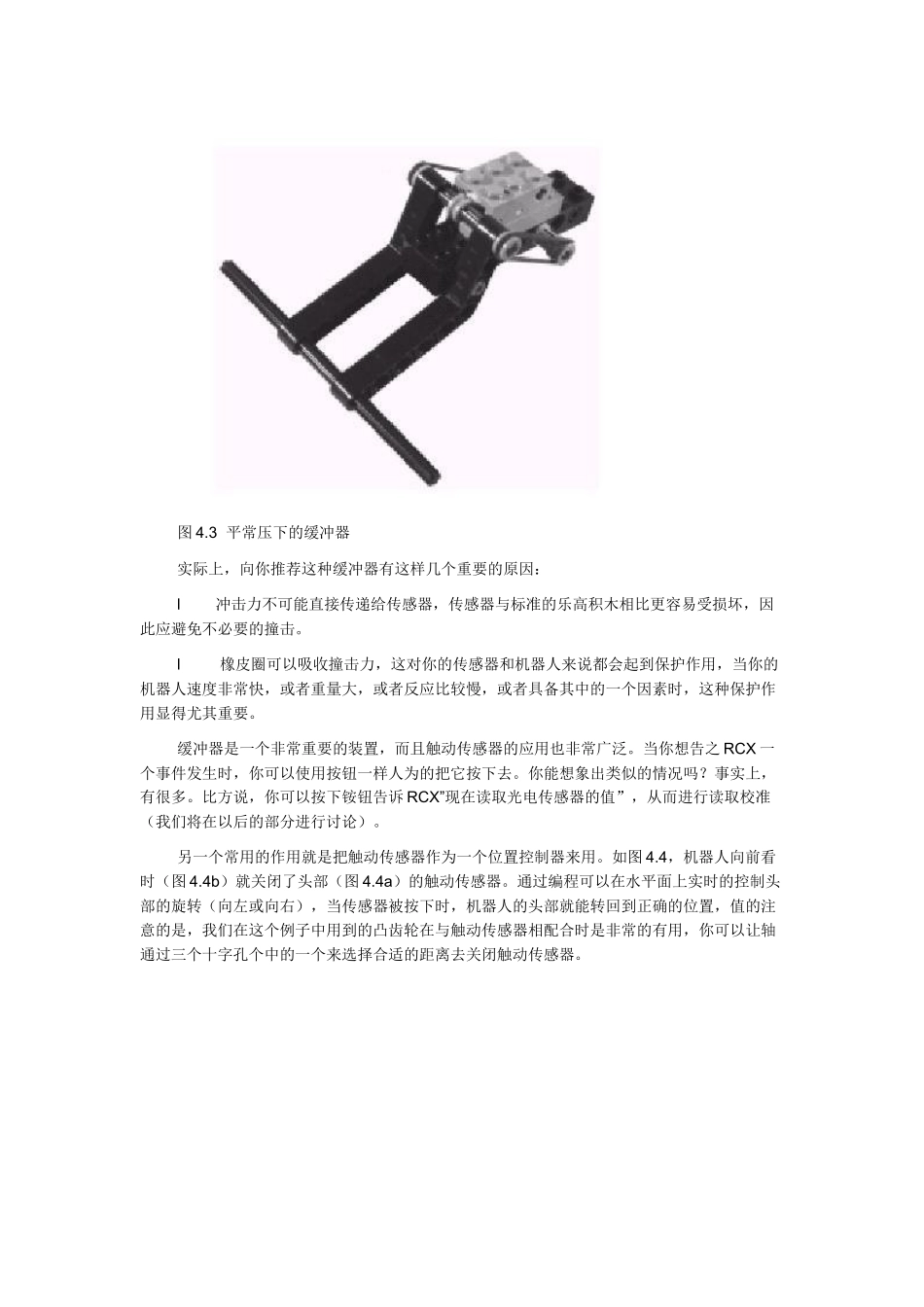
典型的缓冲器是一个重量较轻的可移动装置,事实上,当它碰到障碍物时会把冲击力传递给触动传感器并