第1页共7页编号:时间:2021年x月x日书山有路勤为径,学海无涯苦作舟页码:第1页共7页摘要:介绍了在MATLAB环境下,实现模糊推理的程序化的方法,解决了由于增加模糊量化论域而产生的复杂计算问题,为模糊控制的研究和应用提供了方便的条件
关键词:模糊控制近似推理模糊推理程序化模糊控制具有不依赖对象的数学模型、鲁棒性强、能够很好地克服传动系统中模型参数变化和非线性等不确定因素的优点,因此,模糊控制在实际控制系统中得到广泛应用
模糊控制器普遍采用的是离线进行模糊推理产生的模糊控制表,然后把控制表存储在单片机中进行在线查表控制,但模糊推理计算量大,这给模糊控制器的设计和调整带来了许多困难
此外,模糊控制存在的一个较大的缺点是稳态精度不高
为此,人们提出了许多改进的方法[1],其中最直接的方法是增加模糊量化论域
但是,当量化论域中元素、控制规则的条数很多时,模糊推理计算控制表的运算量大大增加
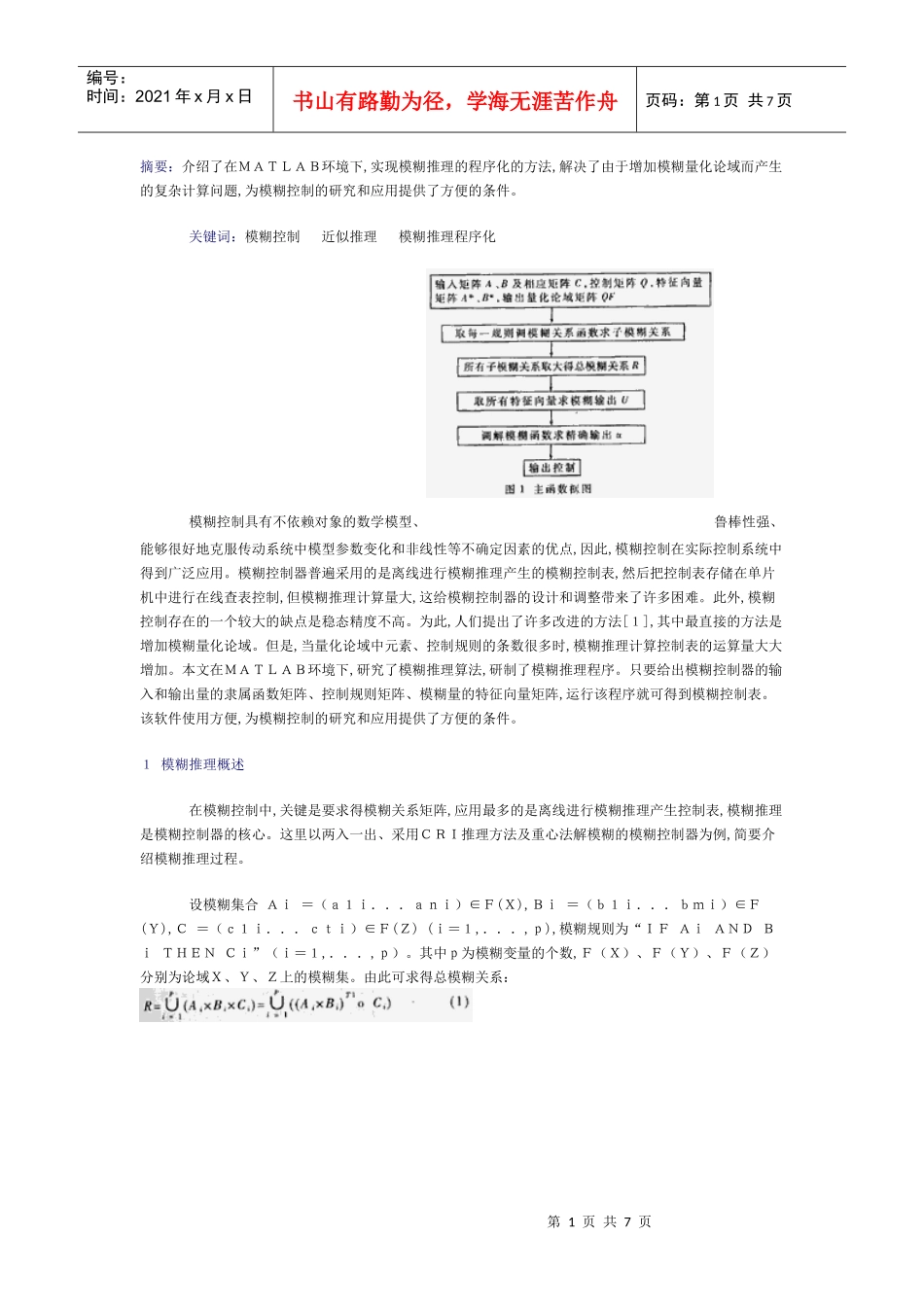
本文在MATLAB环境下,研究了模糊推理算法,研制了模糊推理程序
只要给出模糊控制器的输入和输出量的隶属函数矩阵、控制规则矩阵、模糊量的特征向量矩阵,运行该程序就可得到模糊控制表
该软件使用方便,为模糊控制的研究和应用提供了方便的条件
1模糊推理概述在模糊控制中,关键是要求得模糊关系矩阵,应用最多的是离线进行模糊推理产生控制表,模糊推理是模糊控制器的核心
这里以两入一出、采用CRI推理方法及重心法解模糊的模糊控制器为例,简要介绍模糊推理过程
设模糊集合Ai=(a1i...ani)∈F(X),Bi=(b1i...bmi)∈F(Y),C=(c1i...cti)∈F(Z)(i=1,...,p),模糊规则为“IFAiANDBiTHENCi”(i=1,...,p)
其中p为模糊变量的个数,F(X)、F(Y)、F(Z)分别为论域X、Y、Z上的模糊集
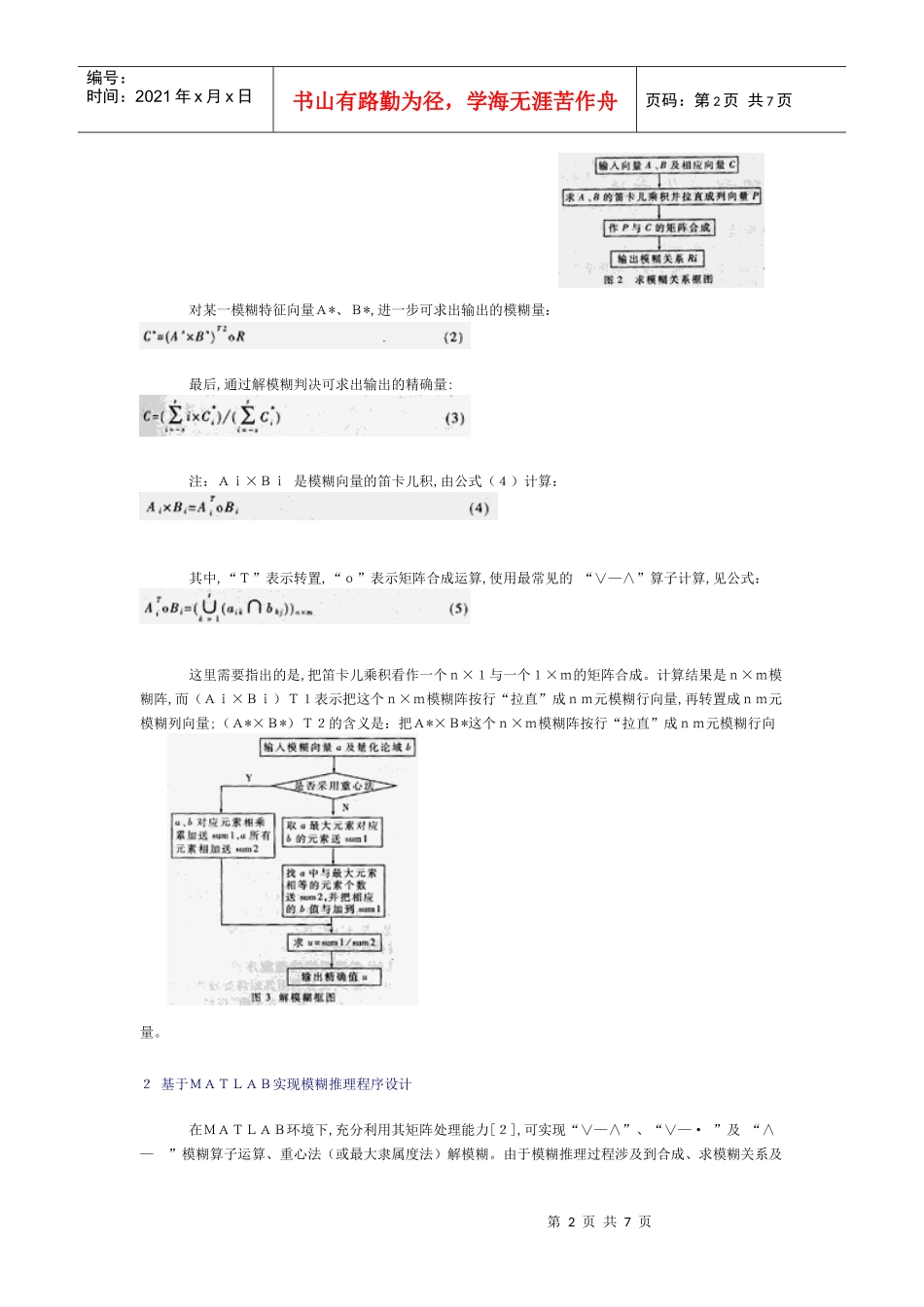
由此可求得总模糊关系:第2页共7页第1页共7页编号:时