2024-2024年学校信息技术第三册同学机器人竞赛1教学建议苏科版[教学目的与要求]1
了解沿线追踪竞赛的规则
了解灰度传感器的工作原理
学会在系统设置中添加灰度传感器,学会设置灰度传感器
学会设置单分支控制控件
以自主探究学习、合作学习的方式,掌握编写机器人沿轨迹线行走的程序
6.逐步培育同学的制造性思维能力、探究精神
让同学在解决问题的过程中体会成功的欢乐
利用所学的机器人知识解决现实生活中的应用问题
[课时安排]建议安排1课时
[教学重点与难点]学会在系统设置中添加灰度传感器,学会设置灰度传感器,学会编程机器人沿轨迹线行走的程序,学会设置单分支控制控件
[教材分析与教法建议]1.教材的地位与作用本课涉的内容较多,难度较深,是一节综合性较强的课
首先让同学了解灰度传感器的工作原理,进而设计沿轨迹线行走的程序
让同学明白机器人是怎样知道自己是往左偏还是往右的偏的
当机器人偏左或偏右时,提醒同学解决的方法是控制直流电机的转弯程序
机器人在运行过程中由于惯性会冲出轨迹线,在程序中设置变量max来标志机器人是从左偏出还是从右偏出,然后强行让机器人左转弯或右转弯
可以通过同学合作学习的方法,一起来讨论机器人在沿轨迹线行走时遇到问题的解决方案
在调试的过程中,让同学明白相同的程序对于不同的机器人,其执行的过程也不一样,要调试出符合自己需要的机器人程序
教材中对“编写程序”中的第二步“测量场地和轨迹线的感光值”只是一笔带过,老师应说明测量场地和轨迹线的感光值的作用,并演示如何进行测量,使同学对于本课知识有更系统的认识
教学方法指导本课可以采纳自主探究法、任务驱动法组织教学
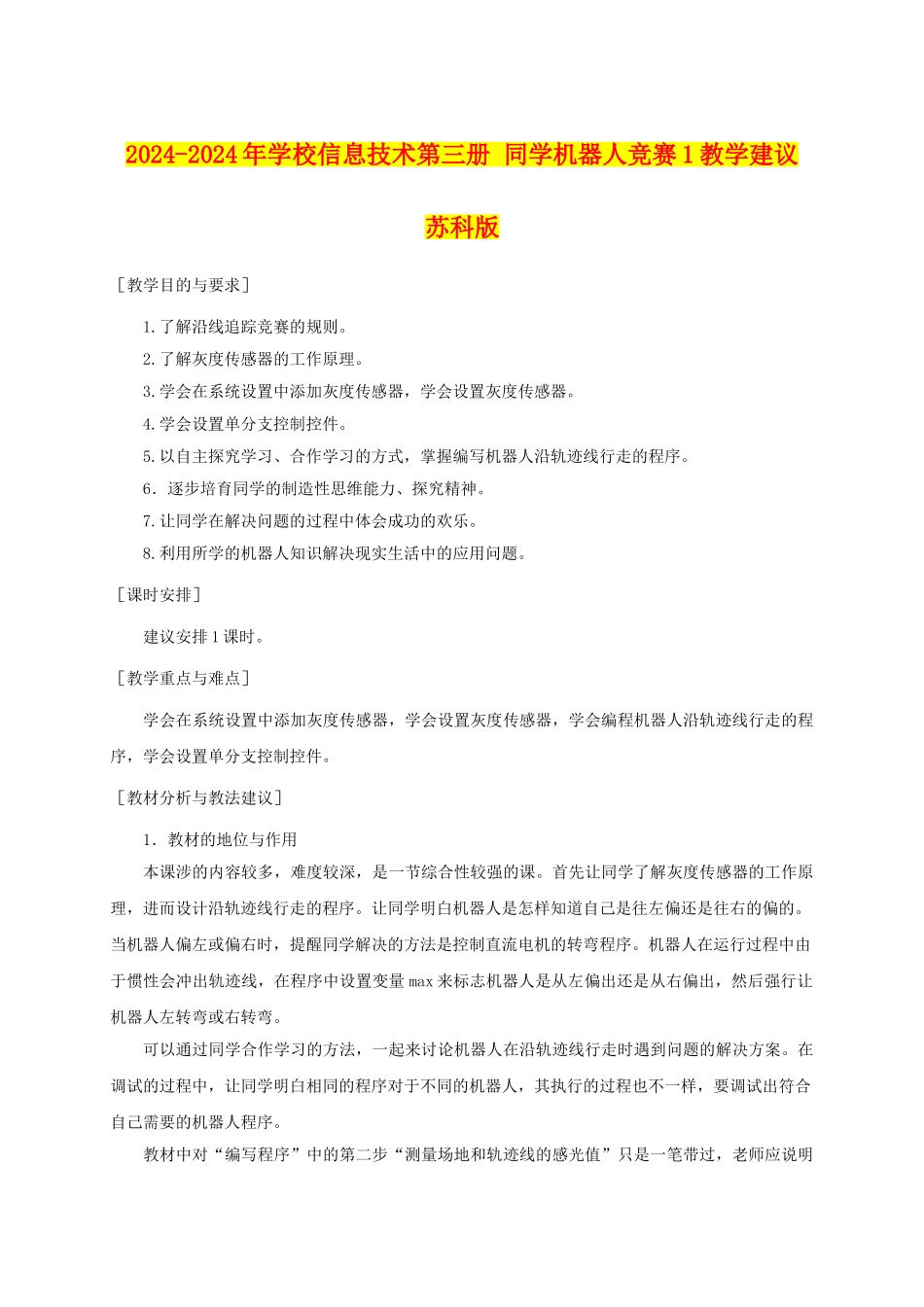
[参考资料]灰度传感器主要用来检测地面的颜色深浅,根据光敏电阻对不同颜色的检测面对光的反射程度不同则其阻值变化的原理进行检测
它由一只发光二极管和一只光敏电阻安装在同一面上,在有效的检