西门子贴片机Y轴控制原理一、REFERENCERUN在STAR轴、Z轴REFERENCERUN完成后,Y轴就进行REFERENCERUN
顺序如下:1Y轴正向运动
2当零点SENSOR的信号从1变成0时,Y轴电机反转
3当零点SENSOR的信号从0变成1时,SCANNER寻找第一个零脉冲
4将找到的第一个零脉冲位置作为零点,将数据存入轴控制卡
5产生ENDSIGNAL信号,等待下一个运行指令
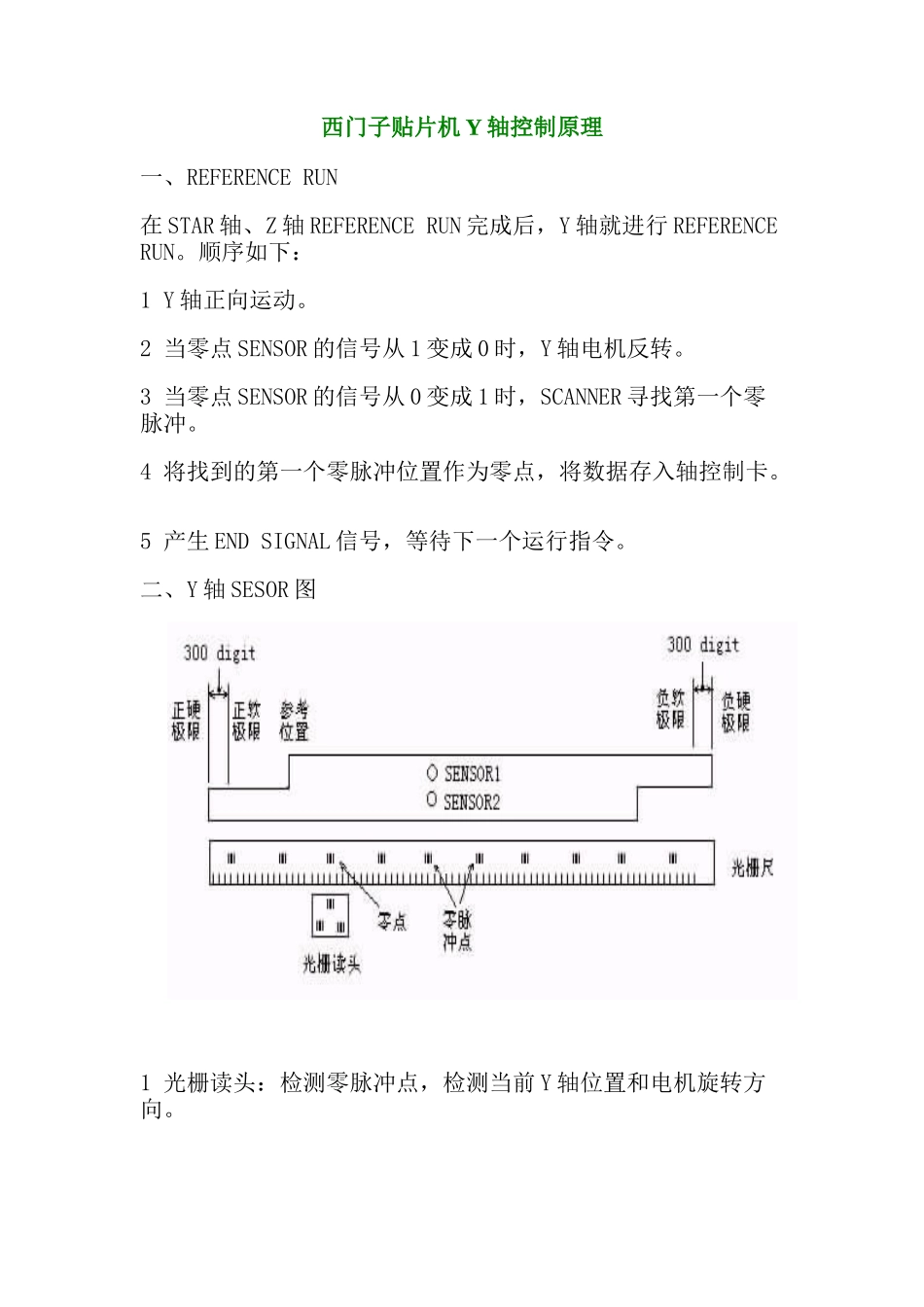
二、Y轴SESOR图1光栅读头:检测零脉冲点,检测当前Y轴位置和电机旋转方向
2光栅尺:有位置刻度和零脉冲点
相邻零脉冲点的间距为50mm
3SENSOR1:检测参考位置,触发光栅读头找零点;检测负硬极限
4SENSOR2:检测正硬极限
5正、负软极限:正、负硬极限以内300digit处,即为正、负软极限
三、Y轴零点和软极限1Y轴零点:不能够输入,由CALIBRATION而生成
2软极限:测试硬极限的位置,再根据硬极限的数据,确定软极限的数据
四、邻近极限区域的运动1在正硬极限缺口处:(即正硬极限与参考位置之间的区域,SENSOR1感应信号为0)Y轴在运动中,当vnominal≥4时,控制部分会紧急制动,切断Y电机电源;当vnominal<4时,Y轴继续运动
2在负硬极限缺口处:(SENSOR2感应信号为0)Y轴在运动中,当vnominal≥4时,控制部分会紧急制动,切断Y电机电源;当vnominal<4时,Y轴继续运动
五、零点SENSOR插头松动时的运动情况(即零点SENSOR的信号为0)1在做REFERENCERUN时,若零点SENSOR插头松动,则Y轴向负方向运动,越过负硬极限,直到被止动橡胶柱挡住
在这种情况下,应尽快按紧急停止,不可让Y轴撞硬极限,以免Y轴电机和伺服控制系统因过载而损坏
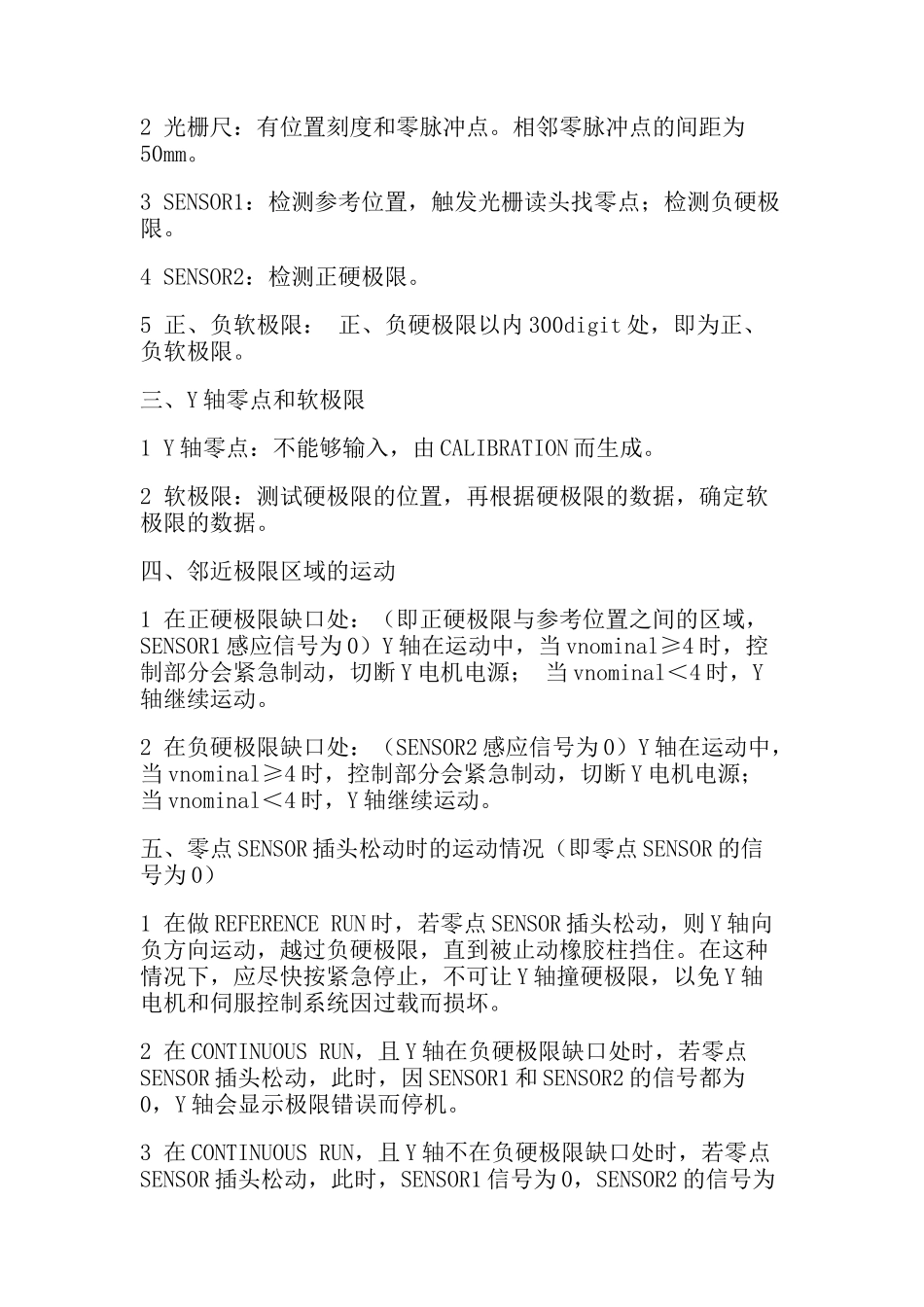
2在CONTINUOUSRUN,且Y轴在负硬极限缺口处时,若零点SENSOR插头松动,