第1页共5页编号:时间:2021年x月x日书山有路勤为径,学海无涯苦作舟页码:第1页共5页范例三电子罗盘一.系统概述本系统的目标是设计一个两轴数字罗盘系统
对其所指的方向进行测量
当系统工作时,系统中的磁阻传感器(HMC1022)对所在地的地磁进行A/D采集,然后对采集量进行处理,将所在的方向相对正北的角度通过串口发送给高端
本系统可工作在正常状态和标定状态
1正常状态在该状态下,系统对地磁进行正常采集后进行校准,然后通过串口将计算的方向角发送出来
2标定状态在该状态下,系统对周围的磁场进行采集,以此为参考,推导出校准参数
退出该状态时,将校准参数保存起来,以便用于对正常状态下采集的数据进行偏置校准
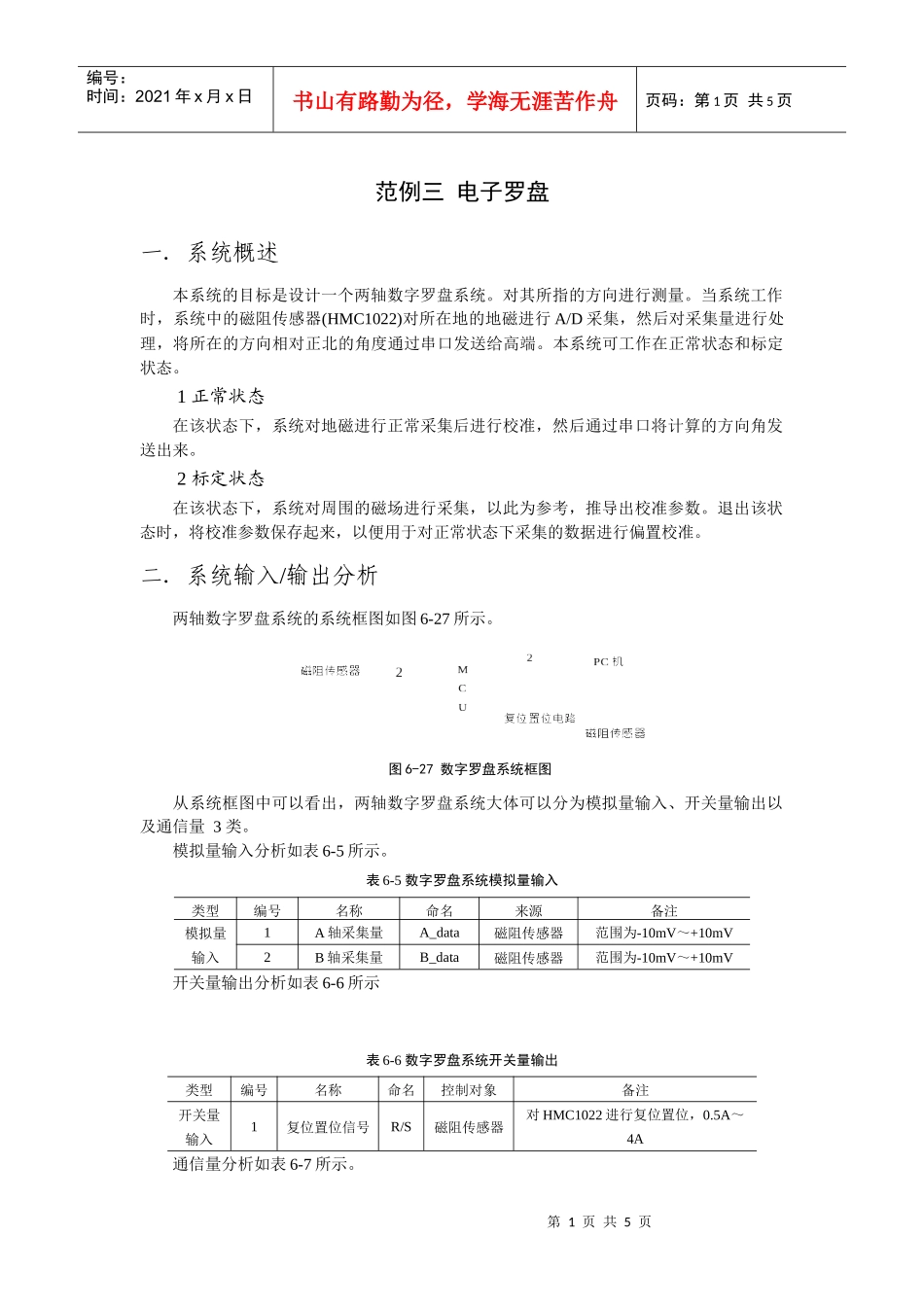
二.系统输入/输出分析两轴数字罗盘系统的系统框图如图6-27所示
图6-27数字罗盘系统框图从系统框图中可以看出,两轴数字罗盘系统大体可以分为模拟量输入、开关量输出以及通信量3类
模拟量输入分析如表6-5所示
表6-5数字罗盘系统模拟量输入类型编号名称命名来源备注模拟量输入1A轴采集量A_data磁阻传感器范围为-10mV~+10mV2B轴采集量B_data磁阻传感器范围为-10mV~+10mV开关量输出分析如表6-6所示表6-6数字罗盘系统开关量输出类型编号名称命名控制对象备注开关量输入1复位置位信号R/S磁阻传感器对HMC1022进行复位置位,0
5A~4A通信量分析如表6-7所示
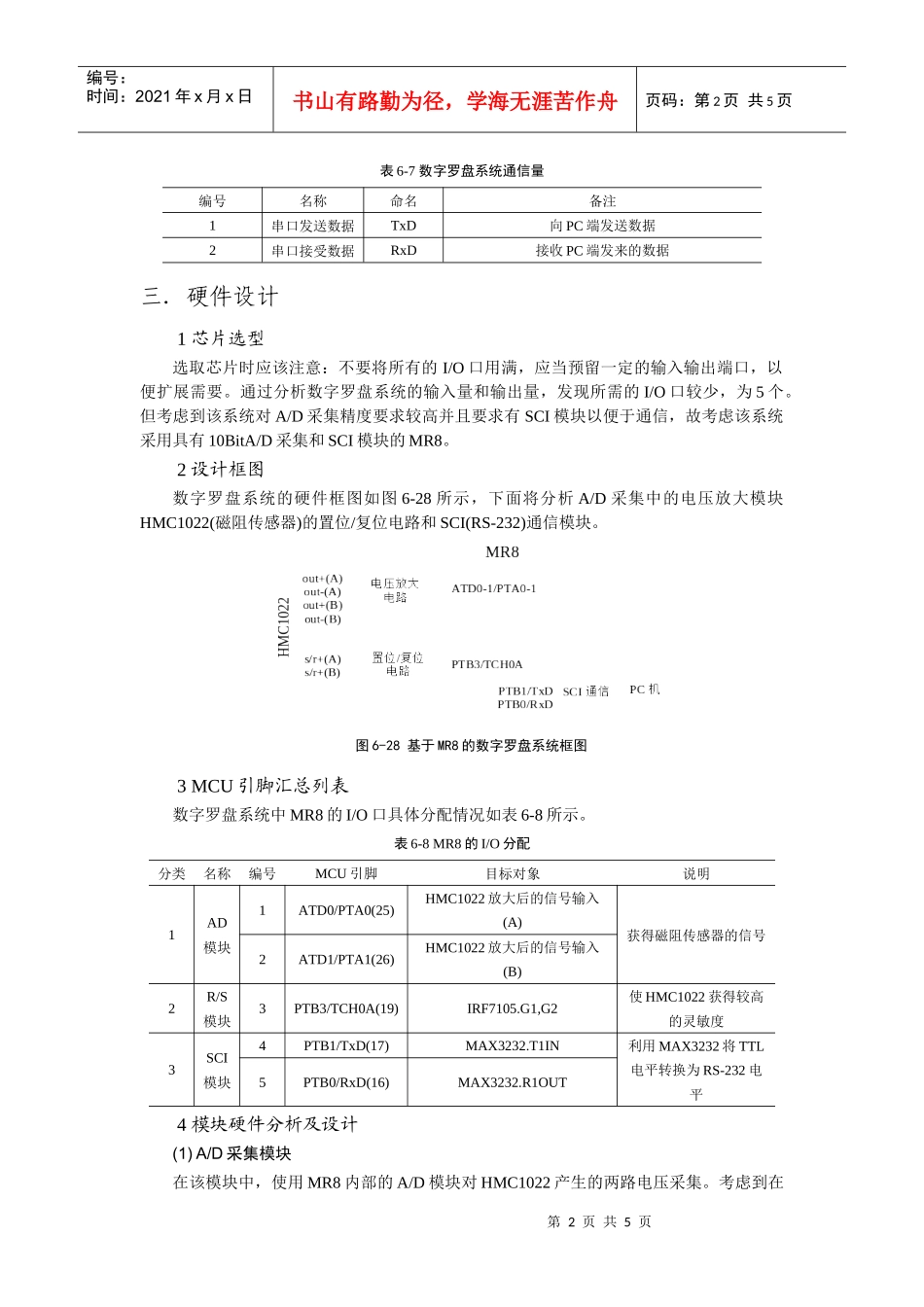
第2页共5页第1页共5页编号:时间:2021年x月x日书山有路勤为径,学海无涯苦作舟页码:第2页共5页表6-7数字罗盘系统通信量编号名称命名备注1串口发送数据TxD向PC端发送数据2串口接受数据RxD接收PC端发来的数据三.硬件设计1芯片选型选取芯片时应该注意:不要将所有的I/O口用满,应当预留一定的输入输出端口,以便扩展需要
通过分析数字罗盘系统的输入量和输出量,发现所需的I/O口较少,为5个