目录第1章序言21
1双足机器人现状21
2技能综合训练意义21
3技能训练的内容2第2章元件选择、结构设计32
1元件选择32
2结构设计三维设计图42
1零件三位模型以及装配42
2装配三维模型7第3章控制系统设计9第4章系统软件编程与仿真11第5章结论17参考文献18附录19第1章序言1
1双足机器人现状随着世界第一台工业机器人1962年在美国诞生,机器人已经有了三十多年的发展史
三十多年来,机器人由工业机器人到智能机器人,成为21世纪具有代表性的高新技术之一,其研究涉及的学科涵盖机械、电子、生物、传感器、驱动与控制等多个领域
世界著名机器人学专家,日本早稻田大学的加藤一郎教授说过:“机器人应当具有的最大特征之一是步行功能
”双足机器人属于类人机器人,典型特点是机器人的下肢以刚性构件通过转动副联接,模仿人类的腿及髋关节、膝关节和踝关节,并以执行装置代替肌肉,实现对身体的支撑及连续地协调运动,各关节之间可以有一定角度的相对转动
双足机器人不仅具有广阔的工作空间,而且对步行环境要求很低,能适应各种地面且具有较高的逾越障碍的能力,其步行性能是其它步行结构无法比拟的
研究双足行走机器人具有重要的意义1
2技能综合训练意义技能训练是在学生修完除毕业设计外全部理论和时间课程以后的一次综合性时间教学环节,其目的和意义在于:通过技能训练,了解机器人机构及控制系统设计的基础知识;掌握机器人系统中元部件的正确选择方法和特性参数的确定;培养学生对所学知识的综合应用,理论联系实际的能力;培养学生的动手能力和实际操作能力;1
3技能训练的内容1、主要内容:1)、机器人结构设计;2)、控制系统软硬件设计与仿真;3)、六自由度机器人运动控制
2、训练形式学生以小组为单位,集体讨论确定整体方案;指导教师给出实训方向,技术指标等,协助学生完成训练任务
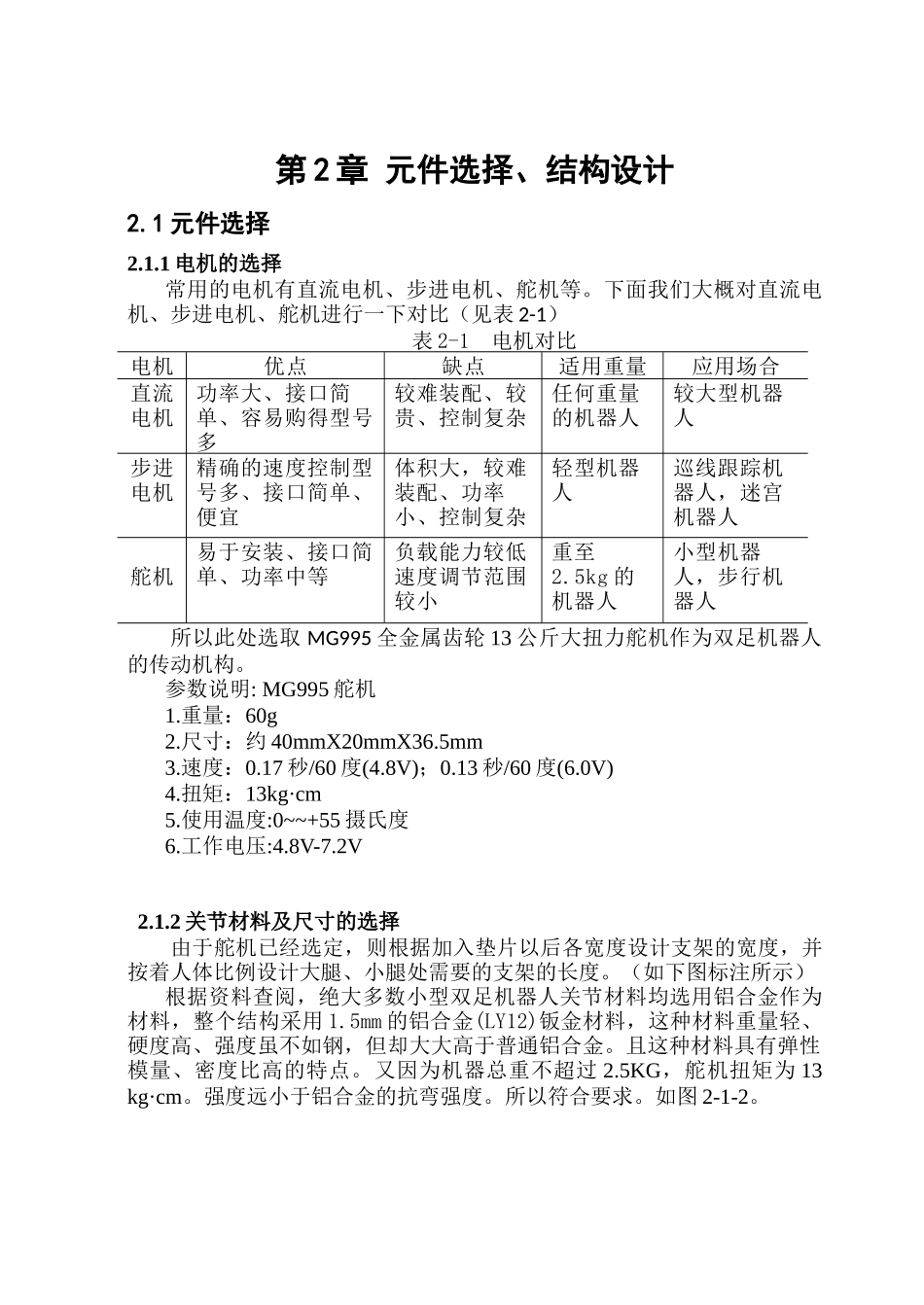
第2章元件选择、结构设计2
1元件选择2