基于MSP430F149单片机的光电编码器位置检测系统设计更新于2011-10-1805:09:57文章出处:电子工程世界德州仪器MSP430F149光电编码器位置检测在实际的工业位置控制领域中,为了提高控制精度,准确地对控制对象进行检测是十分重要的
传统的机械测量位移装置已远远不能满足现代生产的需要,而数字式传感器光电编码器,能将角位移量转换为与之对应的电脉冲输出,主要用于机械位置和旋转速度的检测,具有精度高,体积小等特点,因此决定采用光电编码器进行位移检测
美国TI公司推出的MSP430系列16位单片机,具有低功耗,运行速度快等优点,正日益得到广泛的应用
本文将高精度MSP430单片机应用在系统中,作为整个系统的控制器,整个系统结构简单,抗干扰性强,满足了钢铁厂的生产要求
1、光电编码器原理光电编码器是集光、机、电技术于一体的数字化传感器,其基本原理就是在特制的码盘上按一定规律编排光栅图案,将这些图案用光电头读取,转变为高低有序排列的电平信号
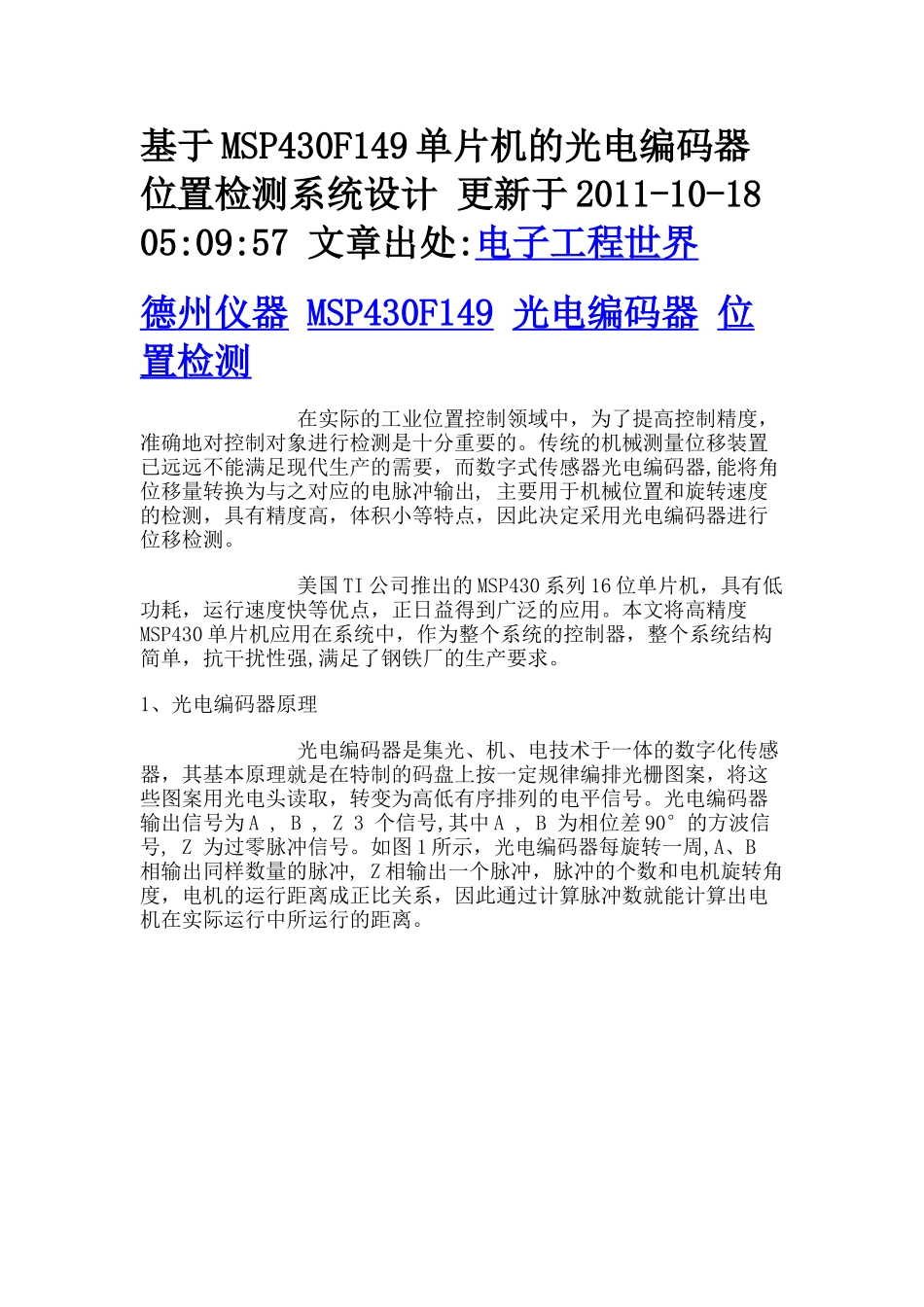
光电编码器输出信号为A,B,Z3个信号,其中A,B为相位差90°的方波信号,Z为过零脉冲信号
如图1所示,光电编码器每旋转一周,A、B相输出同样数量的脉冲,Z相输出一个脉冲,脉冲的个数和电机旋转角度,电机的运行距离成正比关系,因此通过计算脉冲数就能计算出电机在实际运行中所运行的距离
A相、B相都是光电编码器产生的,这两个信号的前沿和后沿都对应着光电码盘的1/4节距的信息
因此在实际中为了提高光电编码器的定位精度通常采用四倍频方法进行处理
鉴相就是通过分析图1的A相,B相信号,得出电机的旋转方向
如果A相脉冲超前B相90,说明电机正转,如果B相脉冲超前A相脉冲90,说明电机反转
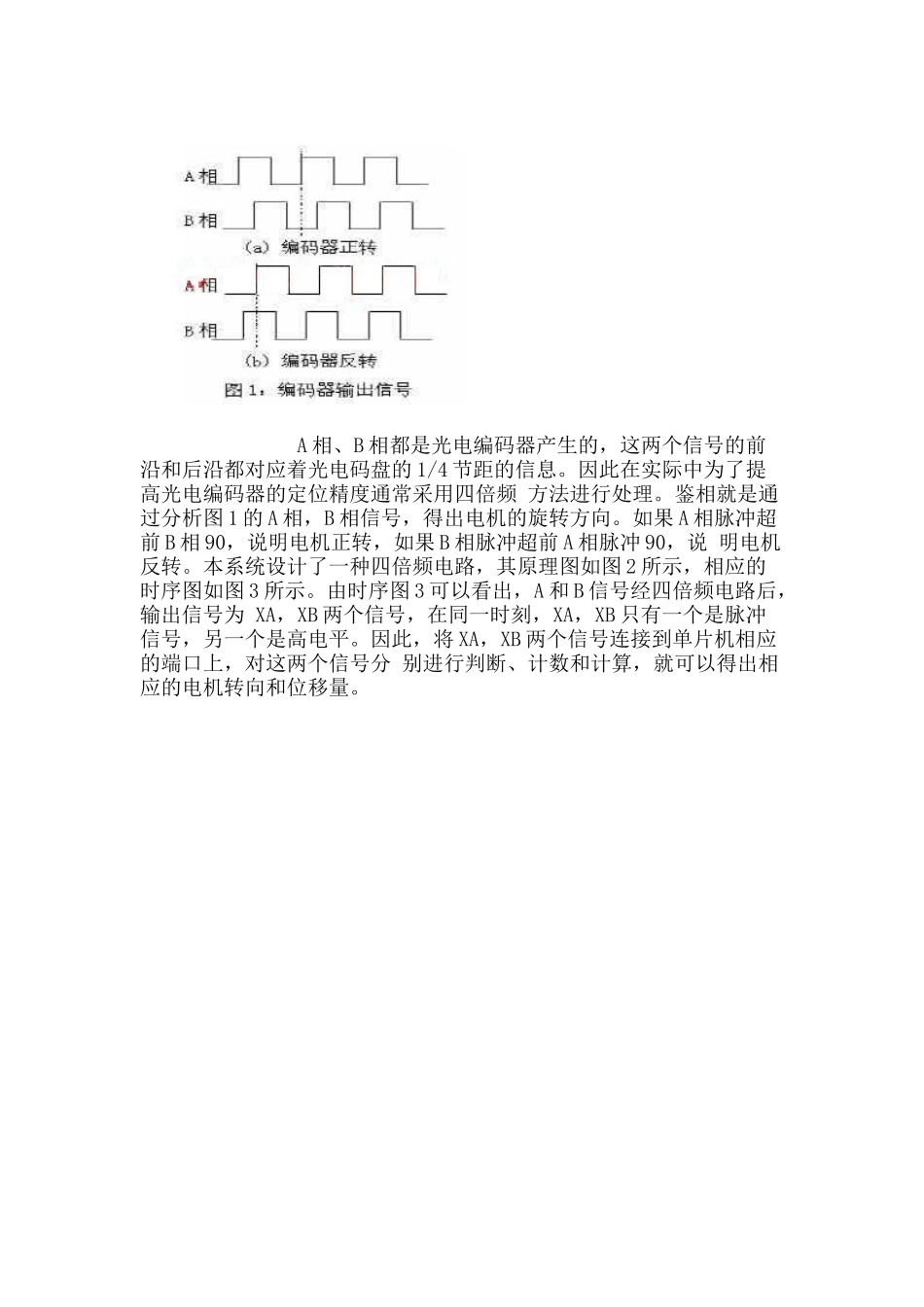
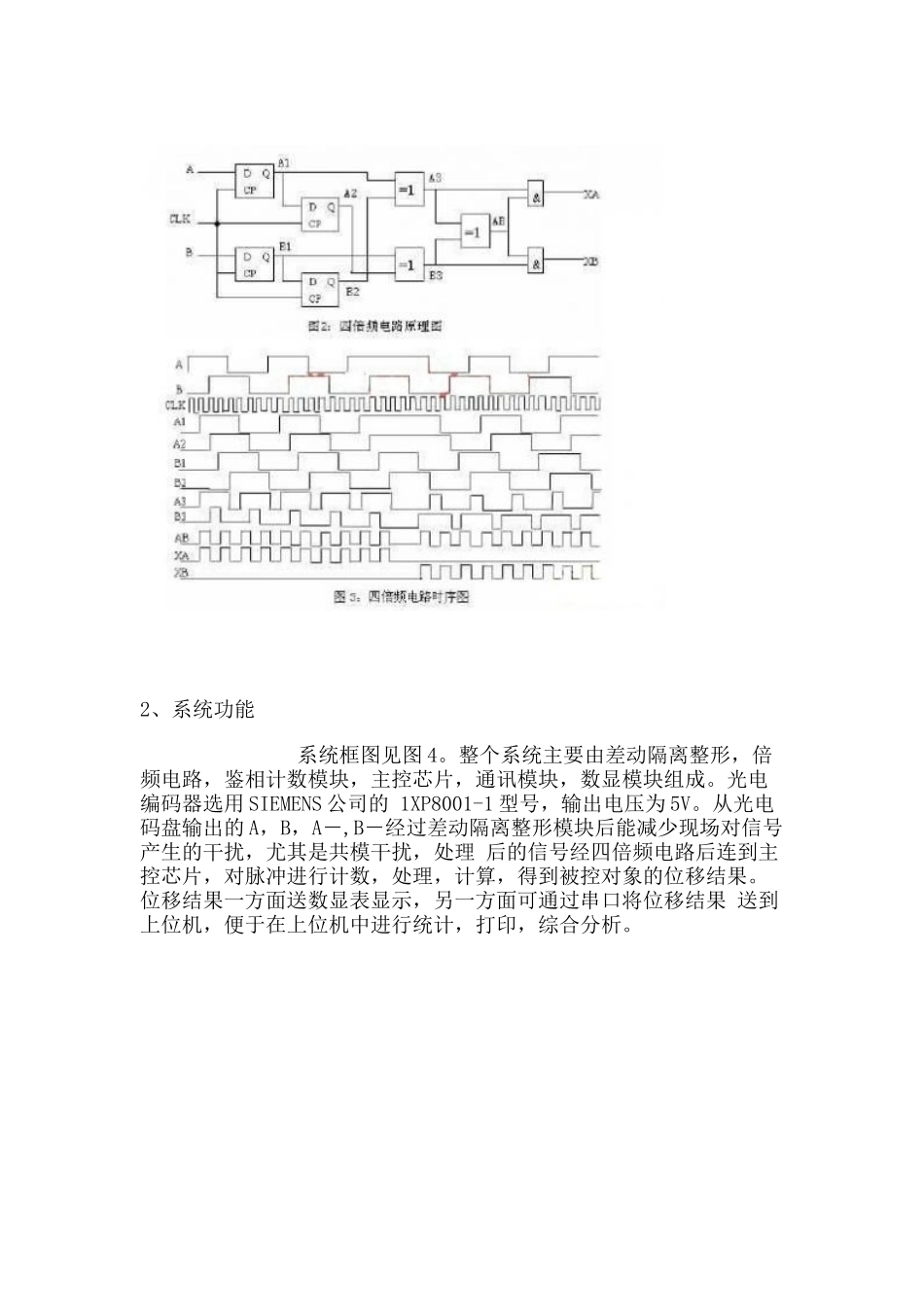
本系统设计了一种四倍频电路,其原理图如图2所示,相应的时序图如图3所示
由时序图3可以看出,A和B信号经四倍频电路后,输出信号为XA,XB两个信号,在同一时