第1页共10页编号:时间:2021年x月x日书山有路勤为径,学海无涯苦作舟页码:第1页共10页2008年振动力学期末考试试题第一题(20分)1、在图示振动系统中,已知:重物C的质量m1,匀质杆AB的质量m2,长为L,匀质轮O的质量m3,弹簧的刚度系数k
当AB杆处于水平时为系统的静平衡位置
试采用能量法求系统微振时的固有频率
解:系统可以简化成单自由度振动系统,以重物C的位移y作为系统的广义坐标,在静平衡位置时y=0,此时系统的势能为零
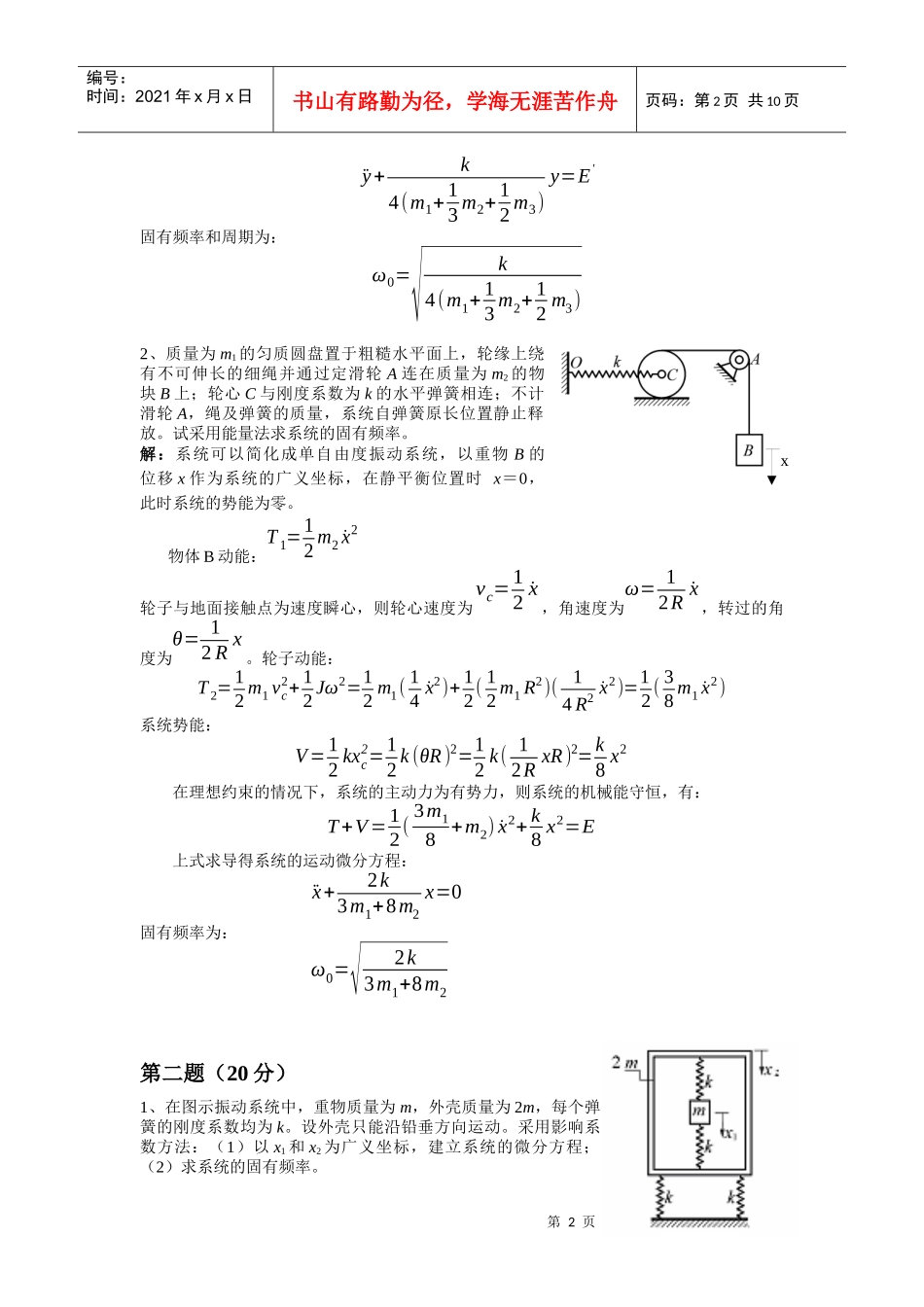
AB转角:ϕ=y/L系统动能:m1动能:T1=12m1˙y2m2动能:T2=12J2ω22=12(13m2L2)˙ϕ2=12(13m2L2)(˙yL)2=12(13m2)˙y2m3动能:T3=12J3ω32=12(12m3R2)(˙yR)2=12(12m3)˙y2系统势能:V=−m1gy+m2g(12y)+12k(12y)2在理想约束的情况下,系统的主动力为有势力,则系统的机械能守恒,因而有:T+V=12(m1+13m2+12m3)˙y2−m1gy+12m2gy+12k(12y)2=E上式求导,得系统的微分方程为:第2页共10页第1页共10页x编号:时间:2021年x月x日书山有路勤为径,学海无涯苦作舟页码:第2页共10页¨y+k4(m1+13m2+12m3)y=E'固有频率和周期为:ω0=√k4(m1+13m2+12m3)2、质量为m1的匀质圆盘置于粗糙水平面上,轮缘上绕有不可伸长的细绳并通过定滑轮A连在质量为m2的物块B上;轮心C与刚度系数为k的水平弹簧相连;不计滑轮A,绳及弹簧的质量,系统自弹簧原长位置静止释放
试采用能量法求系统的固有频率
解:系统可以简化成单自由度振动系统,以重物B的位移x作为系统的广义坐标,在静平衡位置时x=0,此时系统的势能为零
物体B动能:T1=12m2˙x2轮子与地面接触点为速度瞬心,则轮心速度为