第1页共6页编号:时间:2021年x月x日书山有路勤为径,学海无涯苦作舟页码:第1页共6页机械制造装备设计辅导资料十六主题:第四章工业机器人设计(第2节)学习时间:2012年1月16日-2012年1月22日内容:第二节工业机器人的机械结构系统设计一、工业机器人的手臂和机座工业机器人机械结构系统由机座、手臂、手腕、末端执行器和移动装置组成
工业机器人的手臂由动力关节和连接杆件构成,用以支承和调整手腕和末端执行器的位置
手臂部件一般具有2-3个自由度(回转、俯仰、升降或伸缩),包括驱动装置、传动机构、定位导向装置、支承连接件和检测元件等
(一)设计要求1、手臂结构设计要求手臂的结构和尺寸应满足机器人完成作业任务提出的工作空间要求;合理选择手臂截面形状和高强度轻质材料,减轻自重;减小驱动装置的负荷,提高手臂运动的响应速度;提高运动的精确性和运动刚度
2、机座结构设计要求机座主要有回转机座和升降机座两种,用以实现手臂的整体回转或升降;要有足够大的安装基面,以保证机器人工作时的稳定性;机座承受机器人全部重量和工作载荷,应保证足够的强度、刚度和承载能力;机座轴系及传动链的精度和刚度对末端执行器的运动精度影响最大
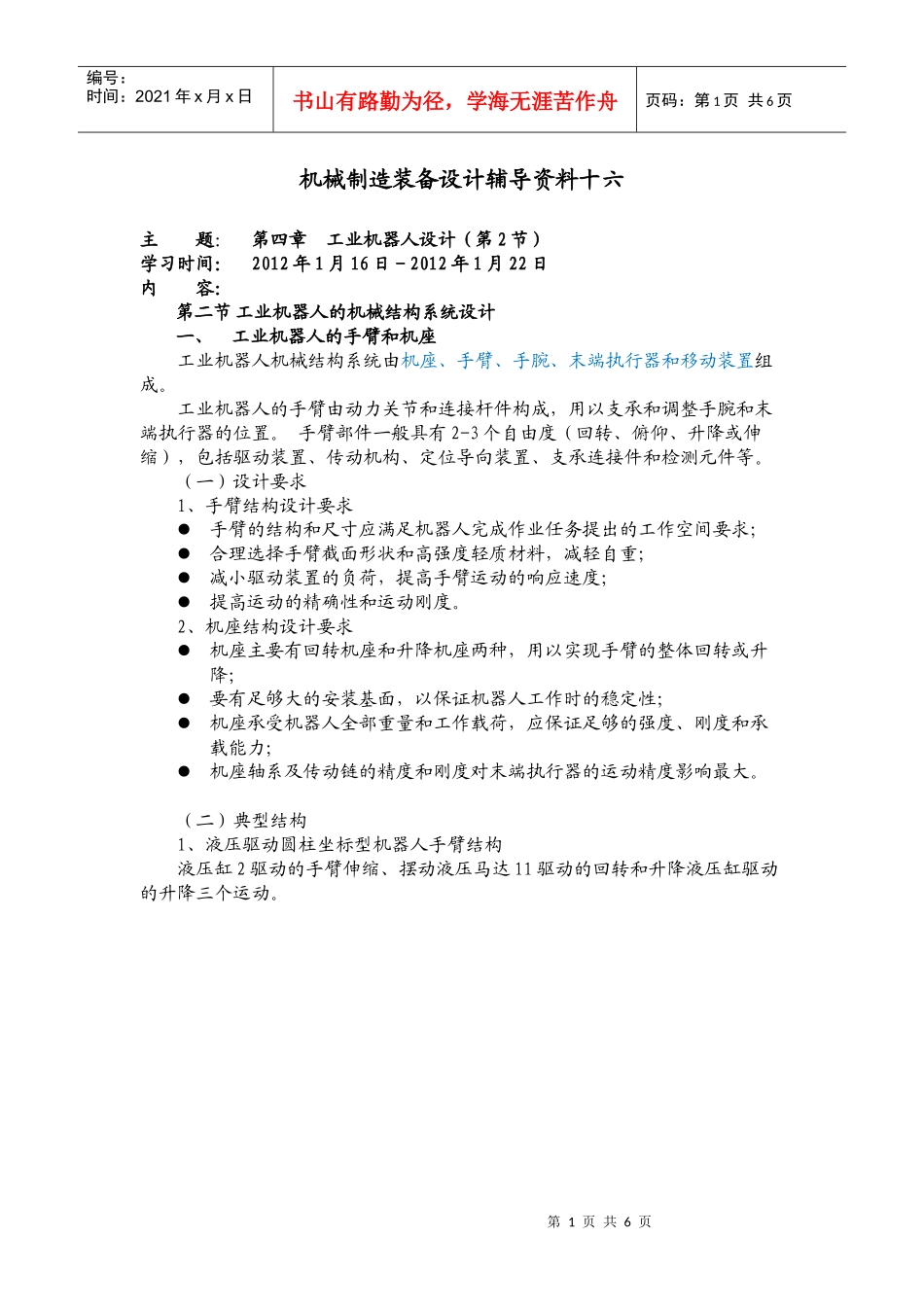
(二)典型结构1、液压驱动圆柱坐标型机器人手臂结构液压缸2驱动的手臂伸缩、摆动液压马达11驱动的回转和升降液压缸驱动的升降三个运动
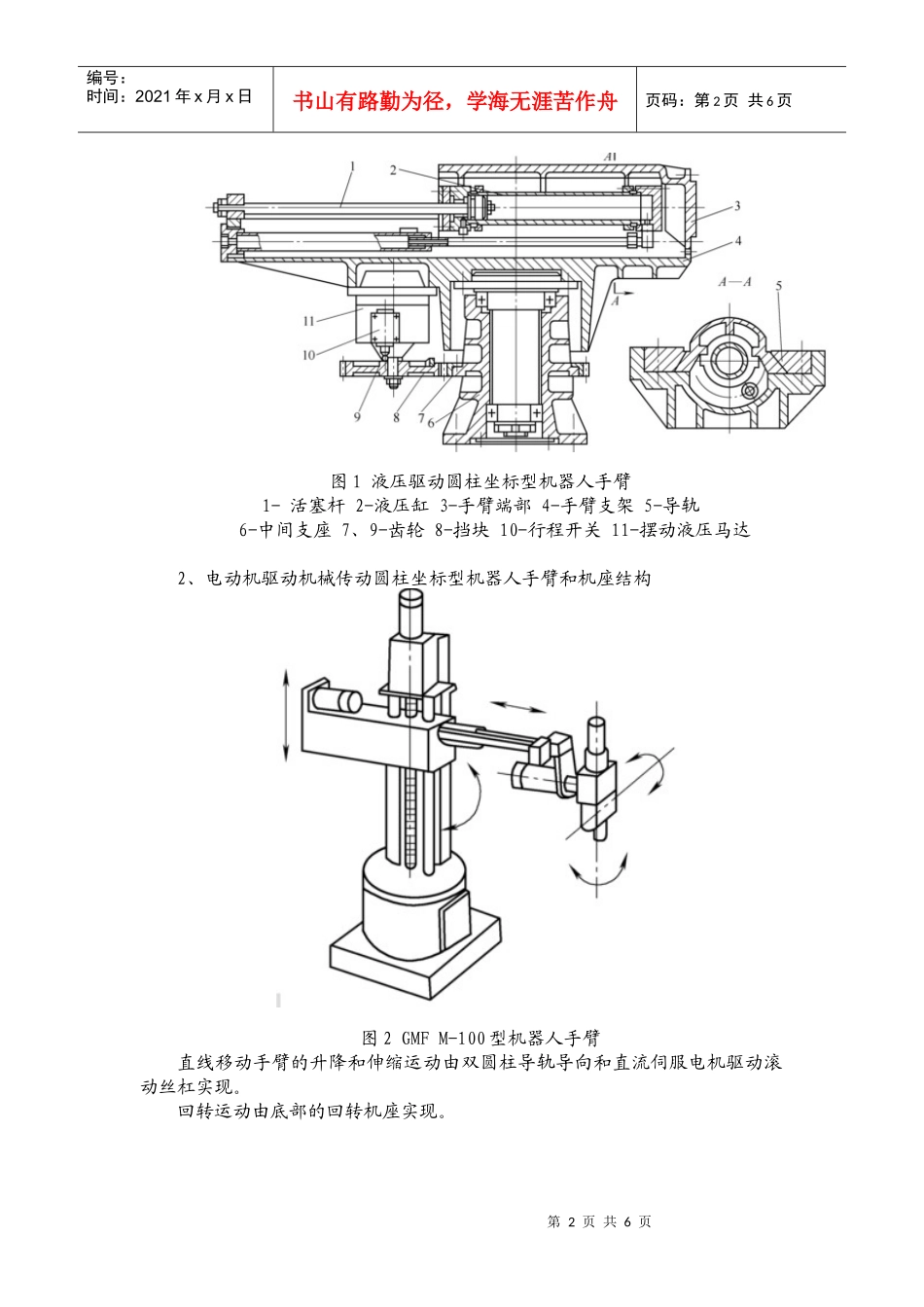
第2页共6页第1页共6页编号:时间:2021年x月x日书山有路勤为径,学海无涯苦作舟页码:第2页共6页图1液压驱动圆柱坐标型机器人手臂1-活塞杆2-液压缸3-手臂端部4-手臂支架5-导轨6-中间支座7、9-齿轮8-挡块10-行程开关11-摆动液压马达2、电动机驱动机械传动圆柱坐标型机器人手臂和机座结构图2GMFM-100型机器人手臂直线移动手臂的升降和伸缩运动由双圆柱导轨导向和直流伺服电机驱动滚动丝杠实现
回转运动由底部的回转机座实