机械手夹持器设计2
1夹持器设计的基本要求(1)应具有适当的夹紧力和驱动力;(2)手指应具有一定的开闭范围;(3)应保证工件在手指内的夹持精度;(4)要求结构紧凑,重量轻,效率高;(5)应考虑通用性和特殊要求
设计参数及要求(1)采用手指式夹持器,执行动作为抓紧—放松;(2)所要抓紧的工件直径为80mm放松时的两抓的最大距离为110-120mm/s,1s抓紧,夹持速度20mm/s;(3)工件的材质为5kg,材质为45#钢;(4)夹持器有足够的夹持力;(5)夹持器靠法兰联接在手臂上
由液压缸提供动力
2夹持器结构设计2
1夹紧装置设计
1夹紧力计算手指加在工件上的夹紧力是设计手部的主要依据,必须对其大小、方向、作用点进行分析、计算
一般来说,加紧力必须克服工件的重力所产生的静载荷(惯性力或惯性力矩)以使工件保持可靠的加紧状态
手指对工件的夹紧力可按下列公式计算:2-1式中:—安全系数,由机械手的工艺及设计要求确定,通常取1
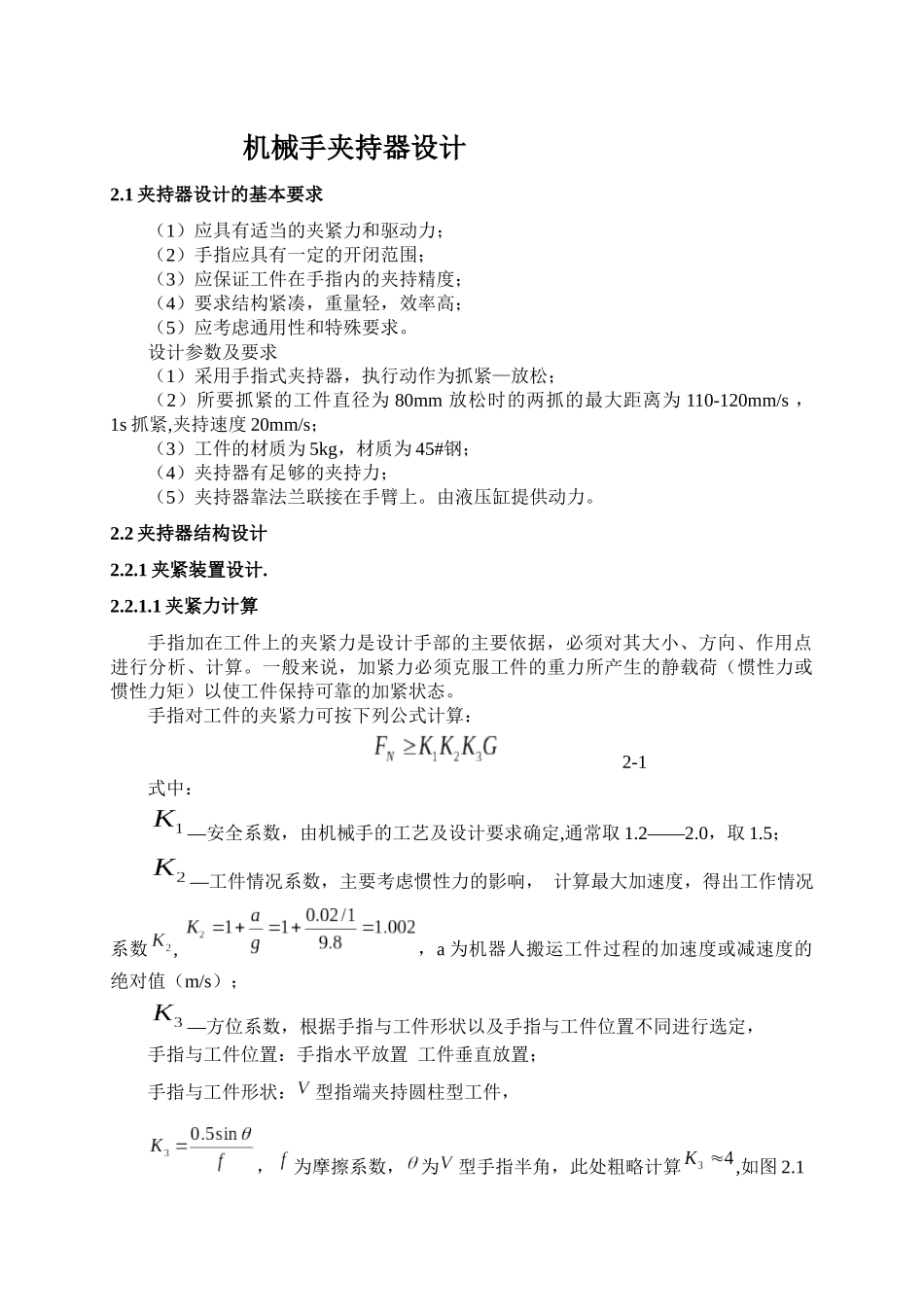
5;—工件情况系数,主要考虑惯性力的影响,计算最大加速度,得出工作情况系数,,a为机器人搬运工件过程的加速度或减速度的绝对值(m/s);—方位系数,根据手指与工件形状以及手指与工件位置不同进行选定,手指与工件位置:手指水平放置工件垂直放置;手指与工件形状:型指端夹持圆柱型工件,,为摩擦系数,为型手指半角,此处粗略计算,如图2
1—被抓取工件的重量求得夹紧力,,取整为177N
2驱动力力计算根据驱动力和夹紧力之间的关系式:式中:c—滚子至销轴之间的距离;b—爪至销轴之间的距离;—楔块的倾斜角可得,得出为理论计算值,实际采取的液压缸驱动力要大于理论计算值,考虑手爪的机械效率,一般取0
9,此处取0
88,则:,取2
3液压缸驱动力计算设计方案中压缩弹簧使爪牙张开,故为常开式夹紧装置,液