第1页共7页编号:时间:2021年x月x日书山有路勤为径,学海无涯苦作舟页码:第1页共7页气动上下料机械手手部结构的设计与分析StructureDesignAndAnalysisOfTheFingerOfPneumaticManipulator摘要:以炮弹径长自动检测生产线上搬运炮弹机械手的手部结构为研究对象,采用单片机对其气压驱动装置进行顺序控制,为保证结构设计的合理性,在论述系统组成、机械手运动、坐标形式及运动范围的基础上,运用有限元分析方法对手部结构进行分析和优化改进,结构设计满足验算结果要求
关键词:机械手;手部结构;结构设计;有限元分析在炮弹径长自动检测生产线上,要检测不同长度炮弹的外径值是否都在规定的尺寸公差内,如果在这个范围内,此炮弹合格;反之,炮弹就成为需要修复的产品或是废品
该工作过程受检测进程的限制,工人劳动强度大,且不易确保炮弹在检测平台上的位置
为了解决上述问题,本文设计一套采用单片机控制的带有摩擦轮压紧装置的气动上下料机械手
机械手手部结构的设计将影响炮弹的表面质量及其在检测平台上的位置,进而影响检测结果,因此运用有限元分析方法对所设计的结构进行应力分析、位移分析,并对结构进行优化设计
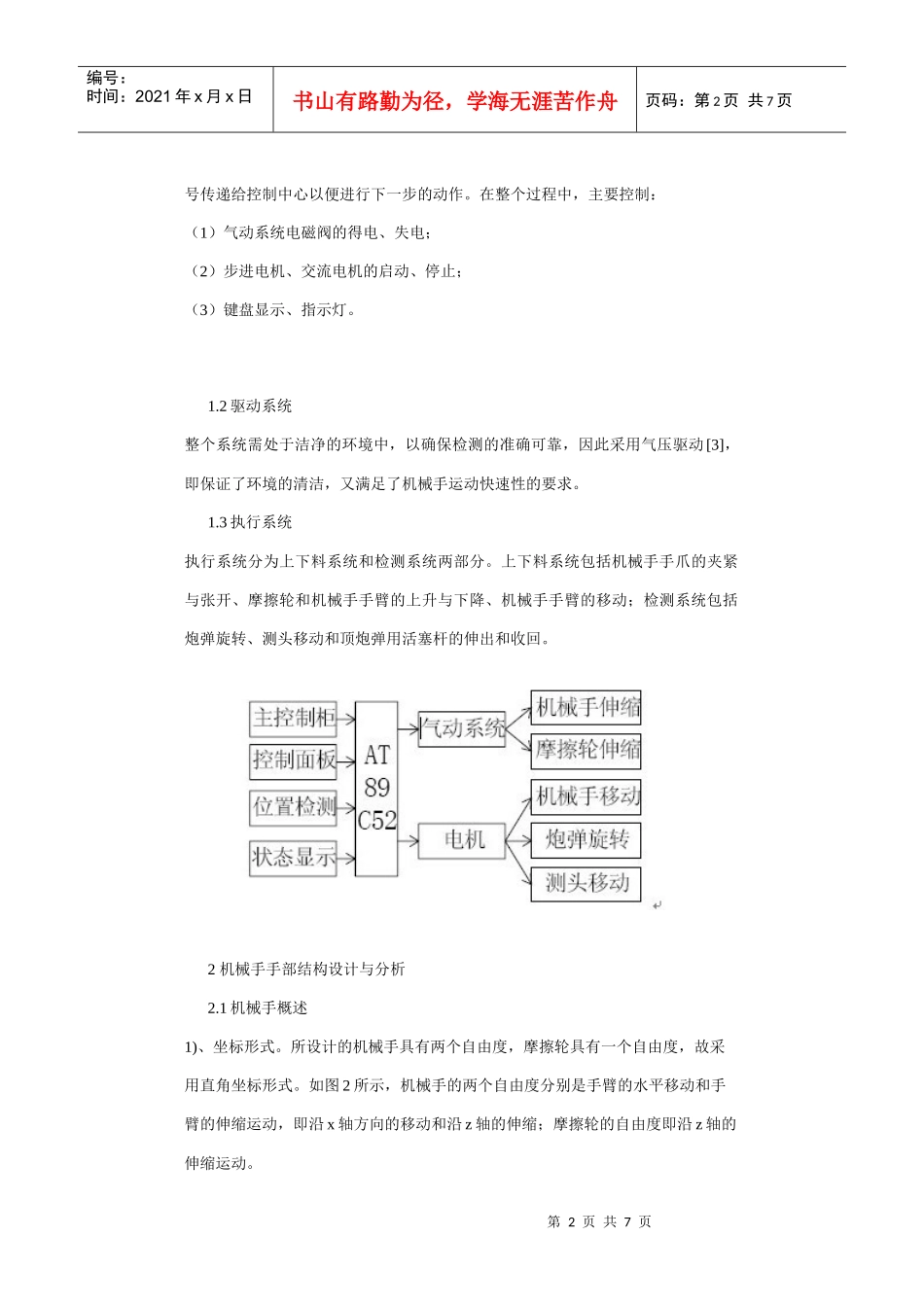
1系统组成整个系统分为控制系统、驱动系统和执行系统三大部分[1],系统组成如图1所示
1控制系统控制系统包括主控制柜、控制面板(状态显示、按钮)和位置检测装置[2]
位置检测装置主要由行程开关组成,用来检测机械手的工作是否到位,并把相关信第2页共7页第1页共7页编号:时间:2021年x月x日书山有路勤为径,学海无涯苦作舟页码:第2页共7页号传递给控制中心以便进行下一步的动作
在整个过程中,主要控制:(1)气动系统电磁阀的得电、失电;(2)步进电机、交流电机的启动、停止;(3)键盘显示、指示灯
2驱动系统整个系统需处于洁净的环境中,以确保检测的准确可靠,因此采