“仿生机器人”资料收集整理1
概念仿生机器鱼是一种按照鱼类游动的推进机理,利用机械、电子元器件或智能材料来实现水下推进的装置
仿生机器鱼可以进行长时间、大范围、工况较复杂的水下作业,可以用于机动性能要求较高的场合,进行海洋生物考察、海底勘探和海洋救生等等许多场合
最近几年来,国内外许多研究机构和高等院校对仿生机器鱼进行了大量的研究,并且在各个领域中得到了实际运用
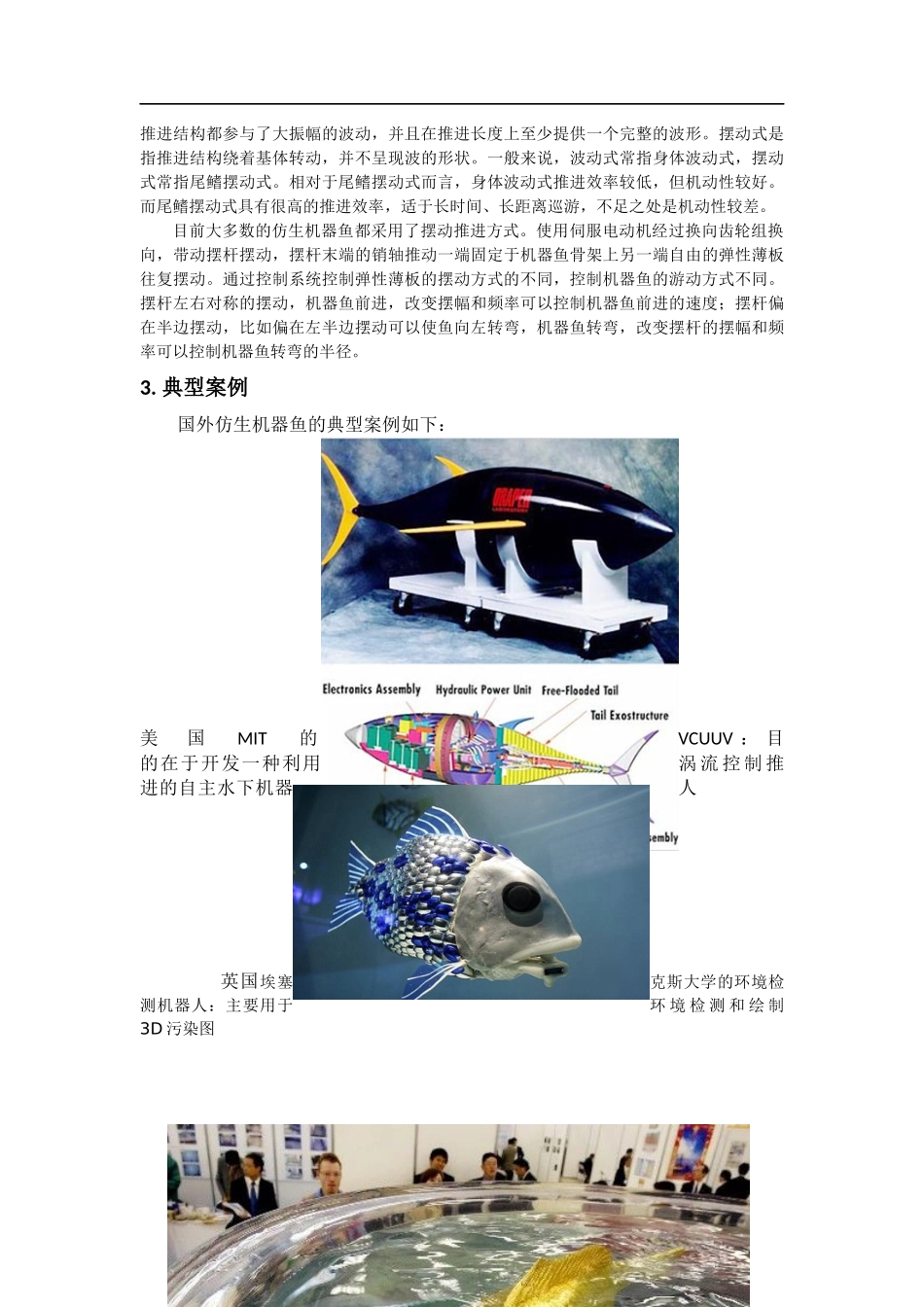
英国埃塞克斯大学的研究人员向泰晤士河投放专门设计的仿生机器鱼,用于探测水中的污染物,并绘制河水的3D污染图
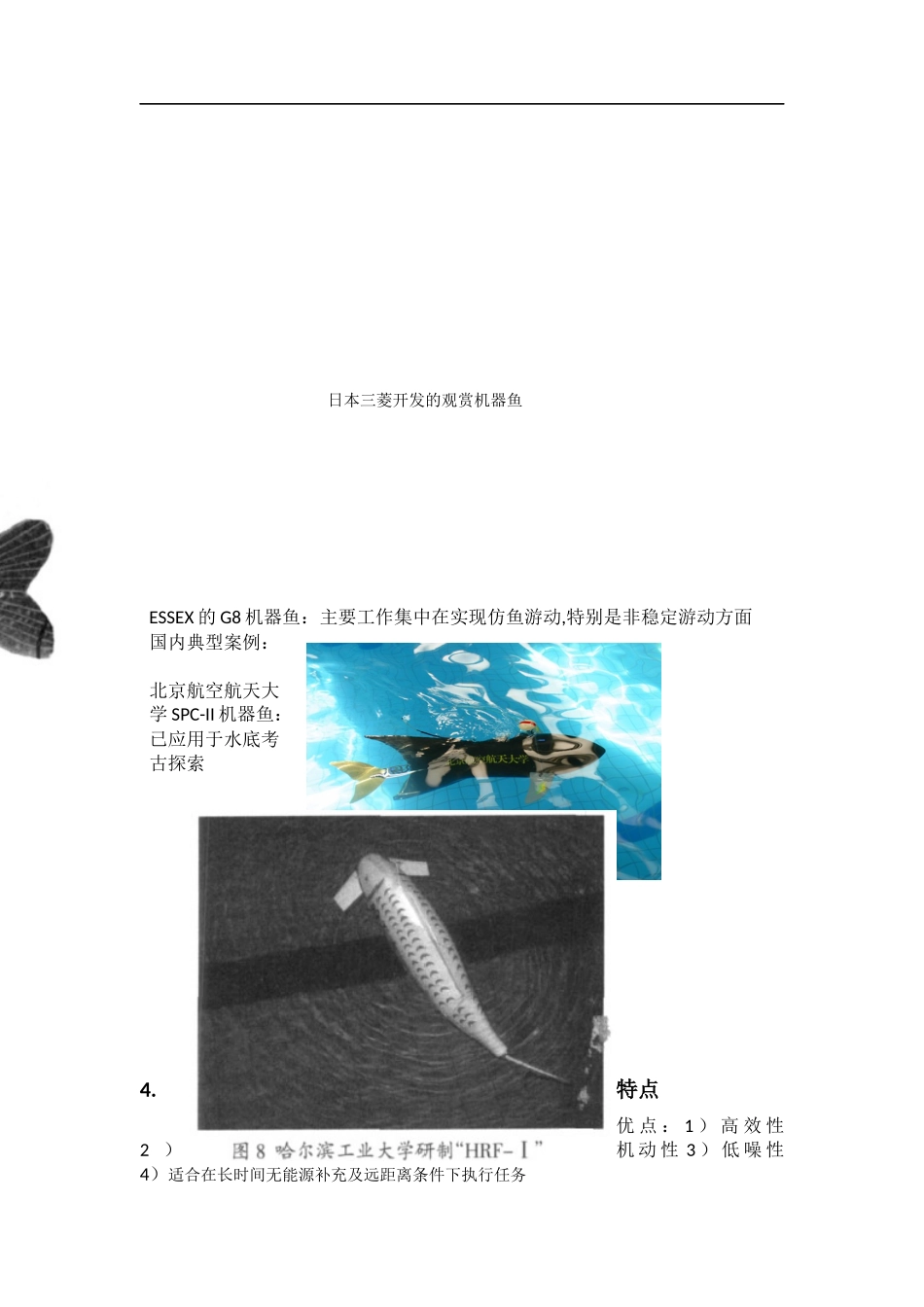
日本三菱重工也已经将研究的仿生机器鱼玩具批量生产
中国北京航空航天大学和中国科学院研制的SPC-II仿生机器鱼也成功地用于水下考古探测
原理仿生机器鱼主要是模仿机器鱼的外形和运动规律,尽心环境数据收集
其模仿鱼类外形和运动规律的目的是为了实现鱼类高效的游动效率和良好的机动性
所以在仿生方面尤其注意鱼体和鱼鳍的模仿和控制
鱼主要有背鳍、胸鳍、腹鳍、臀鳍和尾鳍
胸鳍:它的基本功能为运动、平衡和掌握运动方向
腹鳍:主要协助背鳍、臀鳍维持鱼体的平衡,并有辅助鱼体升降和拐弯功能
尾鳍:有平衡、推进和转向的作用,尾的扭曲和伸直使鱼体产生前进运动
鱼类的运动方式主要为波浪式运动,或称游泳
借助于连续的肌节收缩与舒张,从头部开始的收缩在身体两侧交替进行,形成波浪式的传递,使收缩波传向尾部,身体则向收缩的一侧弯曲使成S型
收缩在尾部结束,尾部将收缩的力传给水,这个力被水以同等大小、但方向相反的反作用力作用于尾部
这个力向前的分力是鱼体向前运动的主要推进力
目前各个研究单位研究的仿生机器鱼的结构不尽相同,但是都主要通过模仿和控制鱼鳍的运动来达到运动目的
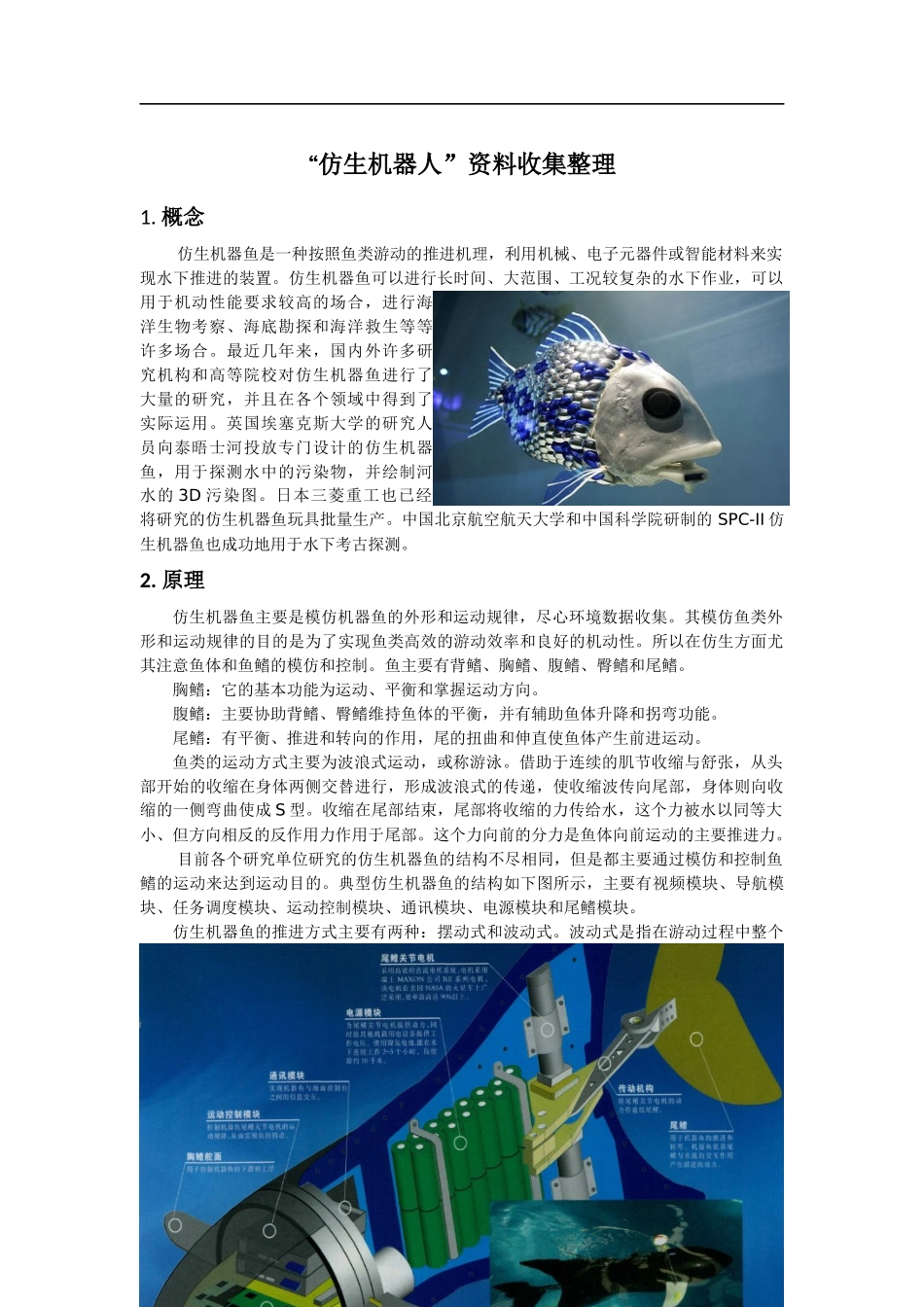
典型仿生机器鱼的结构如下图所示,主要有视频模块、导航模块、任务调度模块、运动控制模块、通讯模块、电源模块和尾鳍模块
仿生机器鱼的推进方式主要有两种:摆动式和波动式