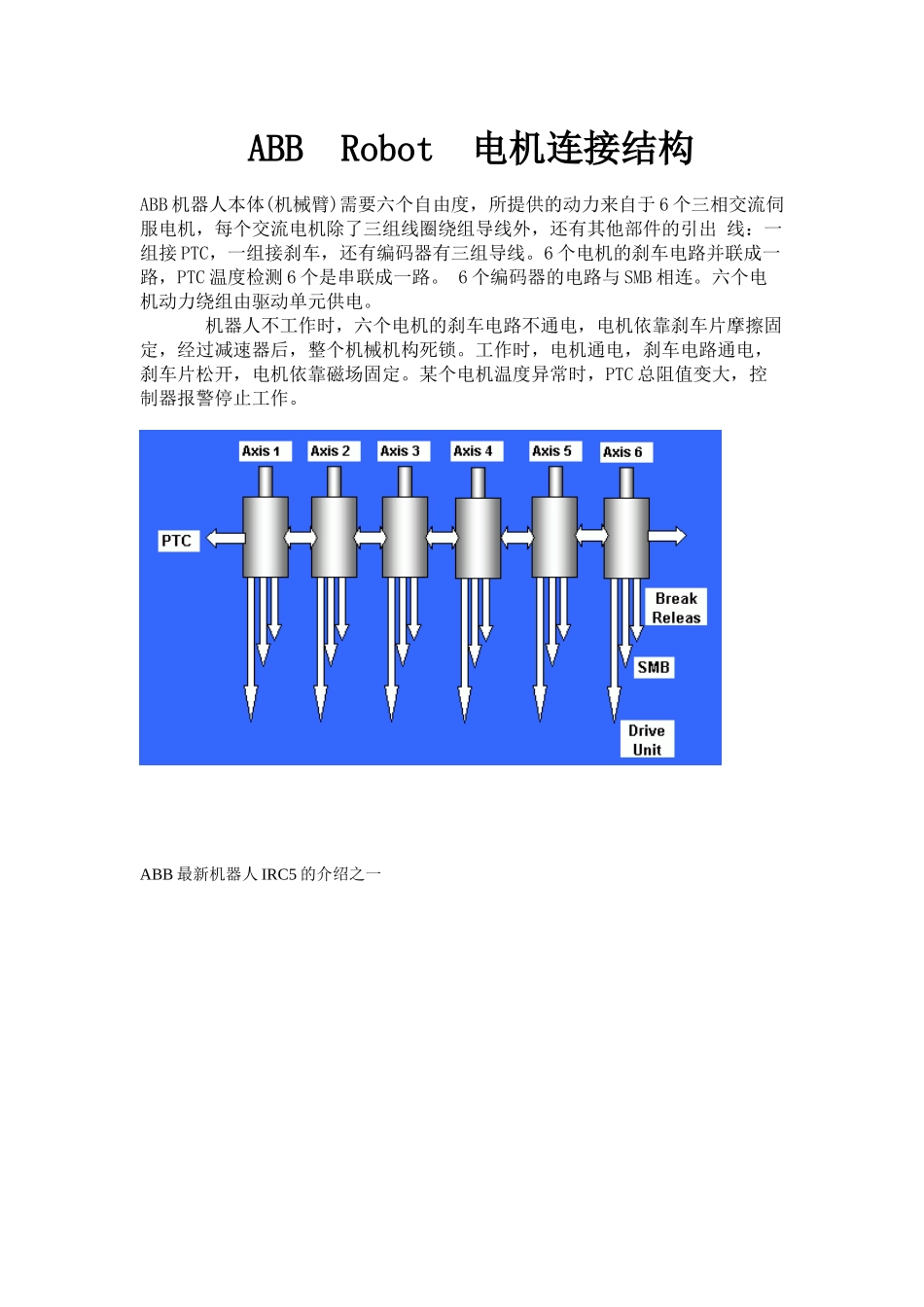
ABBRobot电机连接结构ABB机器人本体(机械臂)需要六个自由度,所提供的动力来自于6个三相交流伺服电机,每个交流电机除了三组线圈绕组导线外,还有其他部件的引出线:一组接PTC,一组接刹车,还有编码器有三组导线
6个电机的刹车电路并联成一路,PTC温度检测6个是串联成一路
6个编码器的电路与SMB相连
六个电机动力绕组由驱动单元供电
机器人不工作时,六个电机的刹车电路不通电,电机依靠刹车片摩擦固定,经过减速器后,整个机械机构死锁
工作时,电机通电,刹车电路通电,刹车片松开,电机依靠磁场固定
某个电机温度异常时,PTC总阻值变大,控制器报警停止工作
ABB最新机器人IRC5的介绍之一为了让大家认识世界一流水平的ABB机器人,以下是对ABB最新型系统的一个深入浅出的介绍,务求让你全方位地了解ABB机器人的优异性能
IRC5SystemIRC5系统常规型号:IRB1400,IRB2400,IRB4400,IRB6600,IRB7600IRB指ABB机器人,第一位数(1,2,4,6,7)指机器人大小第二位数(4)指机器人研发顺序号
无论何型号,机器人控制部分基本相同
IRB1400:承载较小,最大承载为5kg,常用于焊接
IRB2400:承载较小,最大承载为16kg,常用于焊接或搬运
IRB4400:承载较大,最大承载为60kg,常用于搬运或大范围焊接
IRB6600:承载较大,最大承载为225kg,常用于搬运或大范围焊接
IRB7600:承载较大,最大承载为500kg,常用于搬运
IRC5硬件实现多台机器人的协调控制采用模块化设计的IRC5控制器是ABB公司最近推出的第五代机器人控制器,它标志着机器人控制技术领域的一次最重大的进步与革新
促成这一重大革新的不仅仅是IRC5能够通过MultiMove这一新功能控制多达四台完全协调运行的机器人,而且还有其具有创新意义的模块化设计,