(CylinderHead)现代机器人操作培训指导书Hi4/Hi4a操作培训指导书1
系统概述机器人被分为两部分,一个是机器人本体,另一个是控制其本体的控制柜
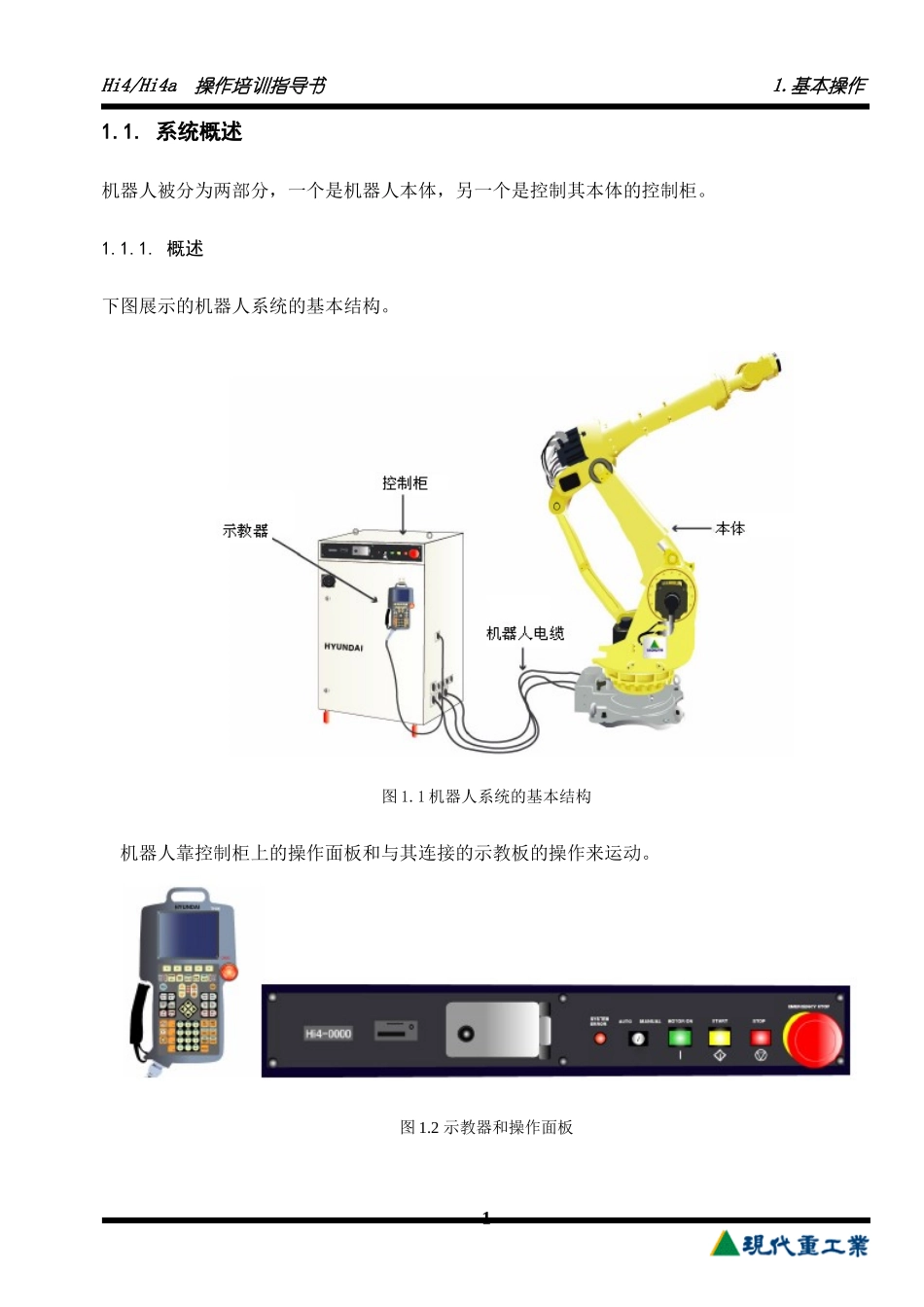
概述下图展示的机器人系统的基本结构
1机器人系统的基本结构机器人靠控制柜上的操作面板和与其连接的示教板的操作来运动
2示教器和操作面板11
基本操作Hi4/Hi4a操作培训指导书1
操作面板操作面板的外观控制柜的操作面板包括自动操作机器人本体的按钮和开关
3操作面板的外观2Hi4/Hi4a操作培训指导书1
按钮描述表1-1按钮描述32
基本操作Hi4/Hi4a操作培训指导书1
示教板的屏幕通过下图中展示的示教板屏幕所显示的
示教板屏幕包括5个标题栏,一个能显示11行40个字的编辑栏
5示教板屏幕屏幕内容标题栏显示当前时间(时:分:秒);模式状态,精度等级和手动速度
(1)当前时间(时:分:秒)显示当前时间
修改时间参照“[PF1]:Service”→“8:Datesetting(Day,time)”4Hi4/Hi4a操作培训指导书1
基本操作(2)模式状态显示操作面板上的[AUTO/MANUL]开关的状态,是自动,还是手动
在手动模式下,机器人的工作是靠指示命令的
在自动模式下,机器人的工作是靠已经指示过的工作模式(一步,一个周期,连续的)
(3)精度等级精度等级范围在0~5之间,用[SHIFT(highspeed)]﹢[ACC/Interpolation]键来实现更改
查看“[PF1]:Service”→“3:Machineparameter”→“8:Accuracy”
(4)手动速度决定手动操作机器人的速度,速度有8个(1~8)等级
速度等级的增加通过按示教板上的键来完成,速度的下降靠键来实现
如果按[SHIFT(highspeed)]