无人直升机飞行控制系统设计报告摘要:本文介绍了用于无人直升机控制的飞行控制系统结构和分部分的主要性能,详细阐述了系统设计方案以及设计思想
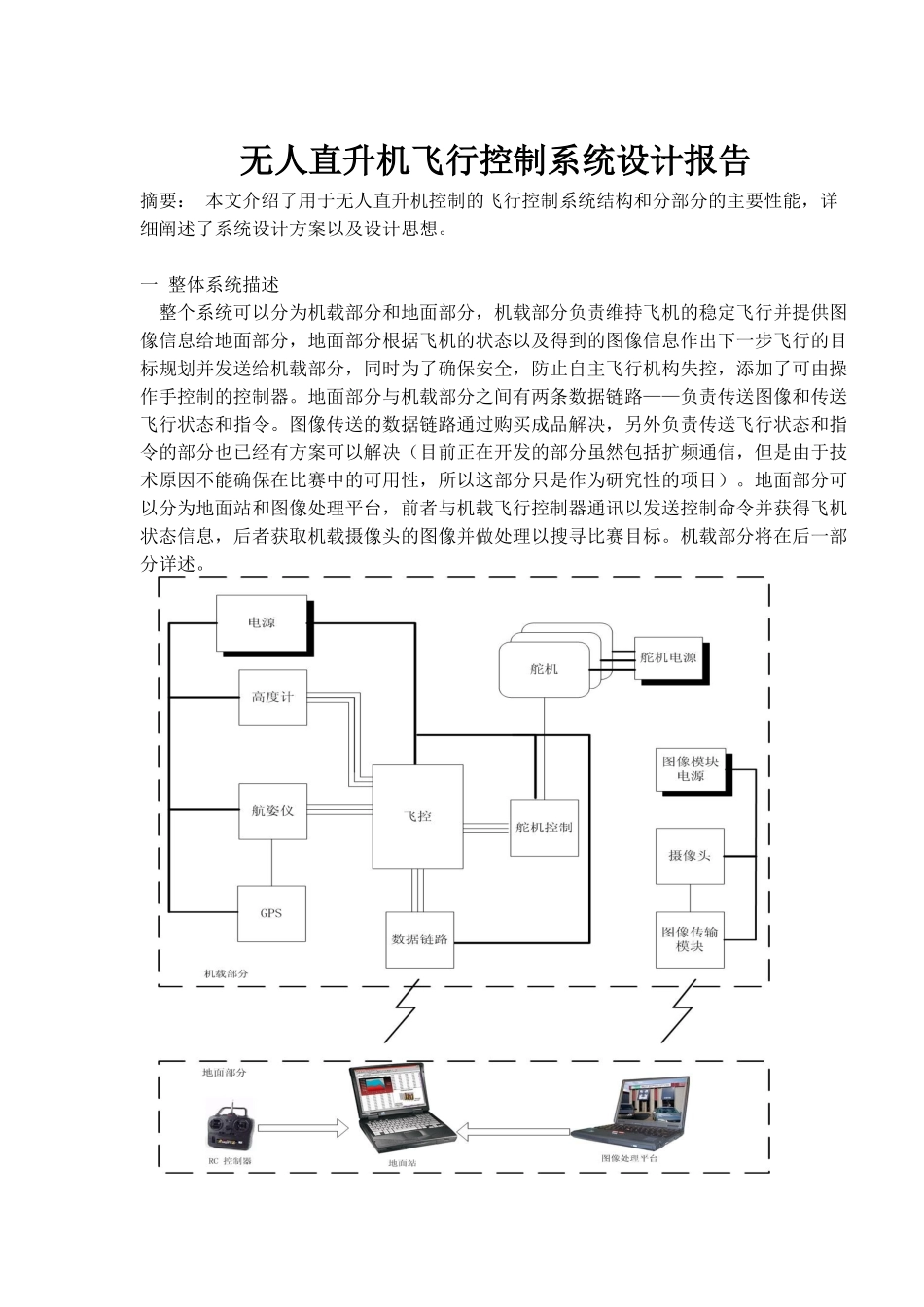
一整体系统描述整个系统可以分为机载部分和地面部分,机载部分负责维持飞机的稳定飞行并提供图像信息给地面部分,地面部分根据飞机的状态以及得到的图像信息作出下一步飞行的目标规划并发送给机载部分,同时为了确保安全,防止自主飞行机构失控,添加了可由操作手控制的控制器
地面部分与机载部分之间有两条数据链路——负责传送图像和传送飞行状态和指令
图像传送的数据链路通过购买成品解决,另外负责传送飞行状态和指令的部分也已经有方案可以解决(目前正在开发的部分虽然包括扩频通信,但是由于技术原因不能确保在比赛中的可用性,所以这部分只是作为研究性的项目)
地面部分可以分为地面站和图像处理平台,前者与机载飞行控制器通讯以发送控制命令并获得飞机状态信息,后者获取机载摄像头的图像并做处理以搜寻比赛目标
机载部分将在后一部分详述
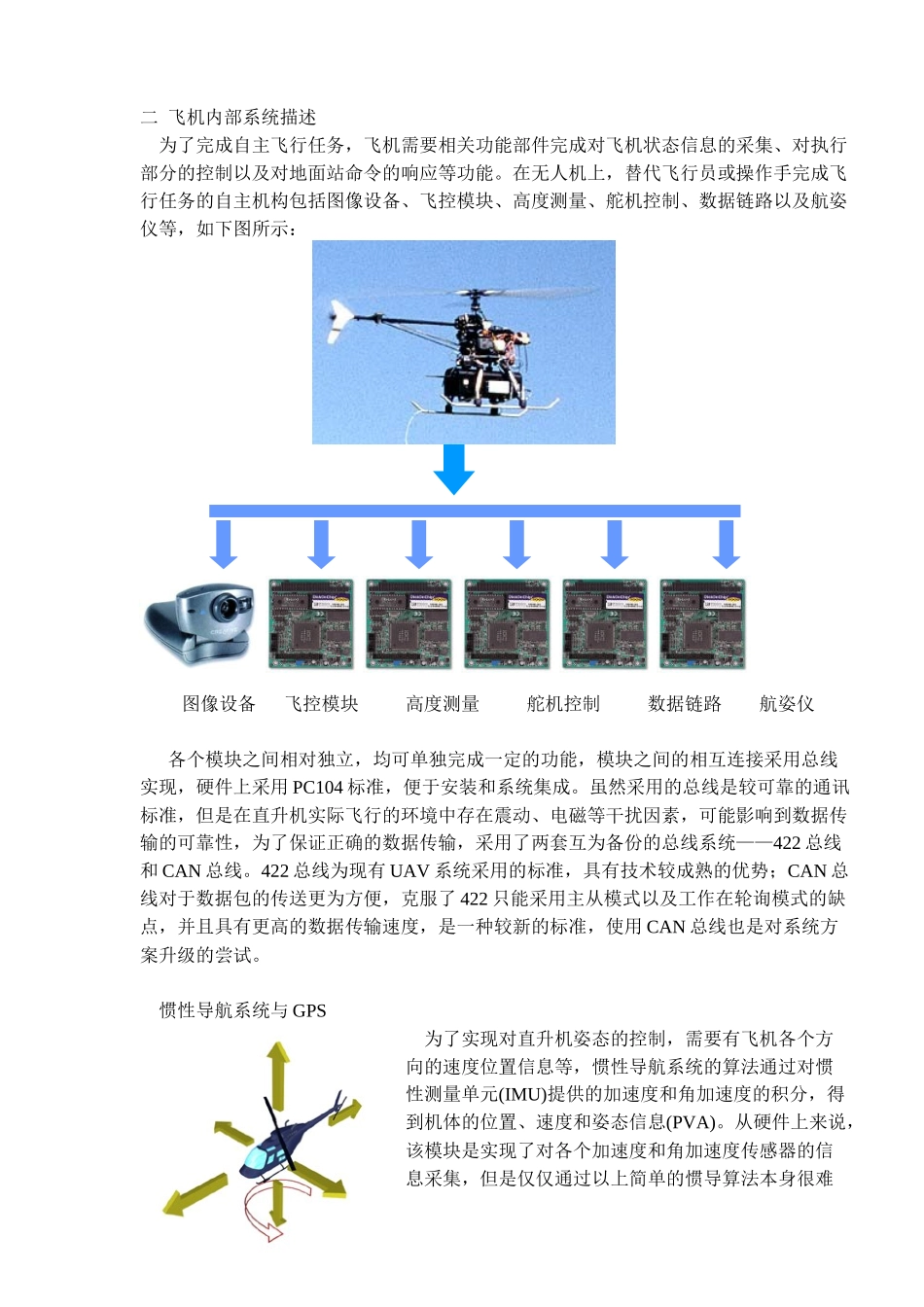
二飞机内部系统描述为了完成自主飞行任务,飞机需要相关功能部件完成对飞机状态信息的采集、对执行部分的控制以及对地面站命令的响应等功能
在无人机上,替代飞行员或操作手完成飞行任务的自主机构包括图像设备、飞控模块、高度测量、舵机控制、数据链路以及航姿仪等,如下图所示:图像设备飞控模块高度测量舵机控制数据链路航姿仪各个模块之间相对独立,均可单独完成一定的功能,模块之间的相互连接采用总线实现,硬件上采用PC104标准,便于安装和系统集成
虽然采用的总线是较可靠的通讯标准,但是在直升机实际飞行的环境中存在震动、电磁等干扰因素,可能影响到数据传输的可靠性,为了保证正确的数据传输,采用了两套互为备份的总线系统——422总线和CAN总线
422总线为现有UAV系统采用的标准,具有技术较成熟的优势;CAN总线对于数据包的传送更为方便,克服了422只能采用主从模式以及工