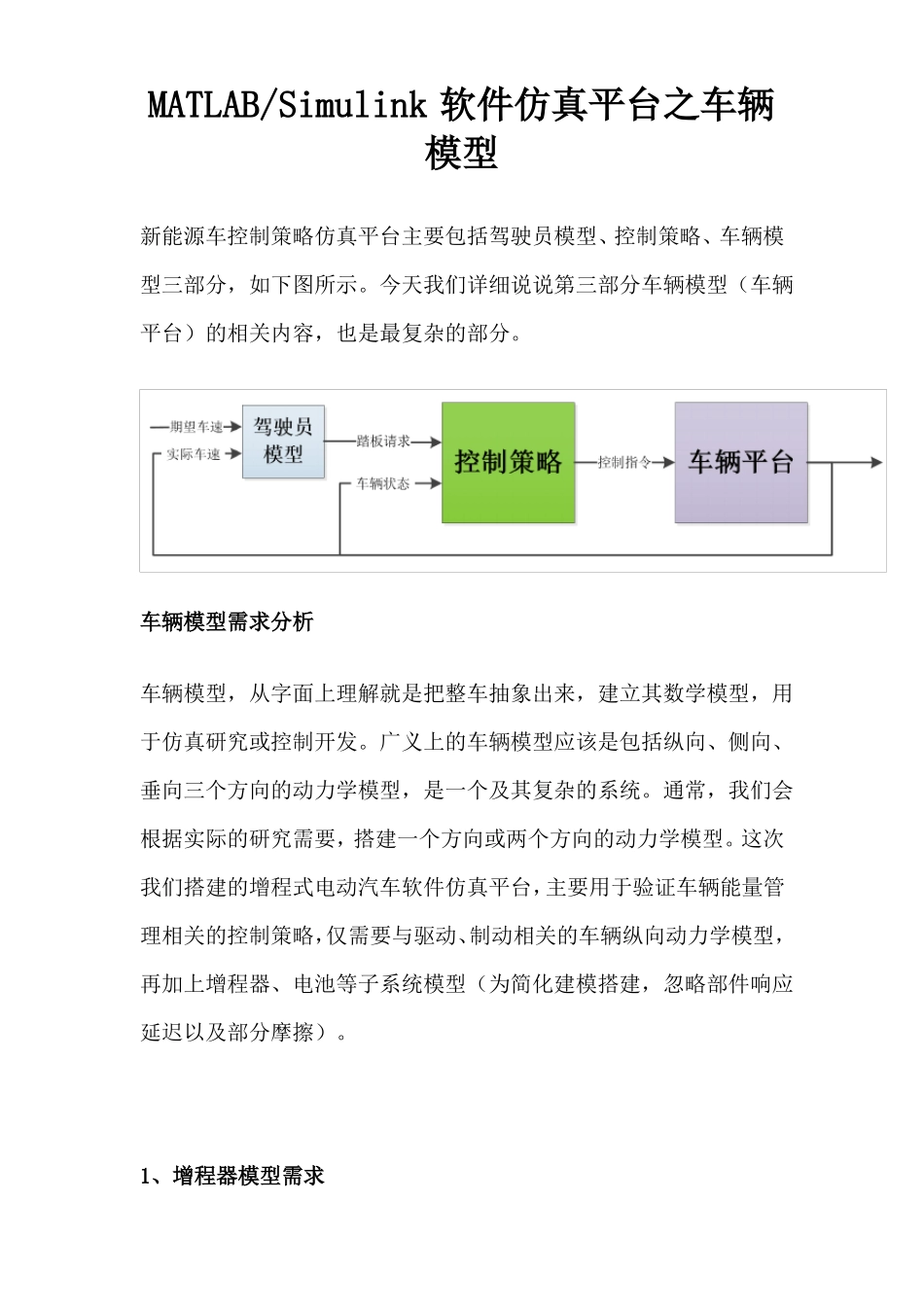
MATLAB/Simulink软件仿真平台之车辆模型新能源车控制策略仿真平台主要包括驾驶员模型、控制策略、车辆模型三部分,如下图所示
今天我们详细说说第三部分车辆模型(车辆平台)的相关内容,也是最复杂的部分
车辆模型需求分析车辆模型,从字面上理解就是把整车抽象出来,建立其数学模型,用于仿真研究或控制开发
广义上的车辆模型应该是包括纵向、侧向、垂向三个方向的动力学模型,是一个及其复杂的系统
通常,我们会根据实际的研究需要,搭建一个方向或两个方向的动力学模型
这次我们搭建的增程式电动汽车软件仿真平台,主要用于验证车辆能量管理相关的控制策略,仅需要与驱动、制动相关的车辆纵向动力学模型,再加上增程器、电池等子系统模型(为简化建模搭建,忽略部件响应延迟以及部分摩擦)
1、增程器模型需求增程器主要包括发动机、发电机,二者一般直连在一起,构成一个提供电能的增程器
发动机启动过程中,发电机出正扭矩把发动机拉到点火转速后,发动机自行点火启动;发动机启动成功后,发动机出正扭矩,发电机出负扭矩发电同时维持发动机转速恒定;发动机停机过程中,发动机和发电机停止出力,在发动机摩擦力的作用下发动机转速会慢慢降为0
增程器模型输入:发动机扭矩请求(来自控制策略,这里用固定的节气门开度近似代替)发电机扭矩请求(来自控制策略,这里用扭矩请求百分比信号近似代替)高压电池电压(来自高压电池实际状态)
增程器模型输出;发电机充放电电流(充电为负,放电为正)模型物理关系:发动机实际扭矩=MAP1(发动机实际转速,发动机节气门开度)发电机实际扭矩=MAP2(发电机实际转速)*发电机扭矩请求百分比发动机转速(即发电机转速)由增程器系统的动力学决定,TENG+TGM=(JENg+JGM)*dw/dt发电机充放电电流由功率守恒计算,充电时TGM*WGM*φ=UBATT*IGM,放电时TGM*WGM/φ=UBATT*IGM2、