WER积木教育机器人能力挑战赛——“能源变革”竞赛规则1主题简介全球经济不断增长,科技大发展,技术的不断创新给我们的生活带来巨大便捷和美好
与此同时,越来越多的人认识到因过度使用和依赖不可再生资源而带来的能源危机迫在眉睫
能源的大量消耗、二氧化碳的大量排放,导致全球气候恶化,人类也因此付出了惨痛的代价
传统能源的开采和使用终将已难以为继,能源问题将成为人类面向未来的一个复杂、多变、相互博弈和不同维度的严峻挑战
我们不得不把目光转向太阳能、风能、生物质能、水力等清洁可再生能源
随着科技技术的发展和迭代,我们必然会掌握清洁可再生能源的利用,并实现碳中乃至零排放
这是一场人类的共同的期盼;也是一场由不可再生能源转变成可再生清洁能源的巨大变革;更是一场百年未有之大变局
2竞赛主题本届教育机器人能力挑战赛的主题为“能源变革”
3竞赛场地与环境3
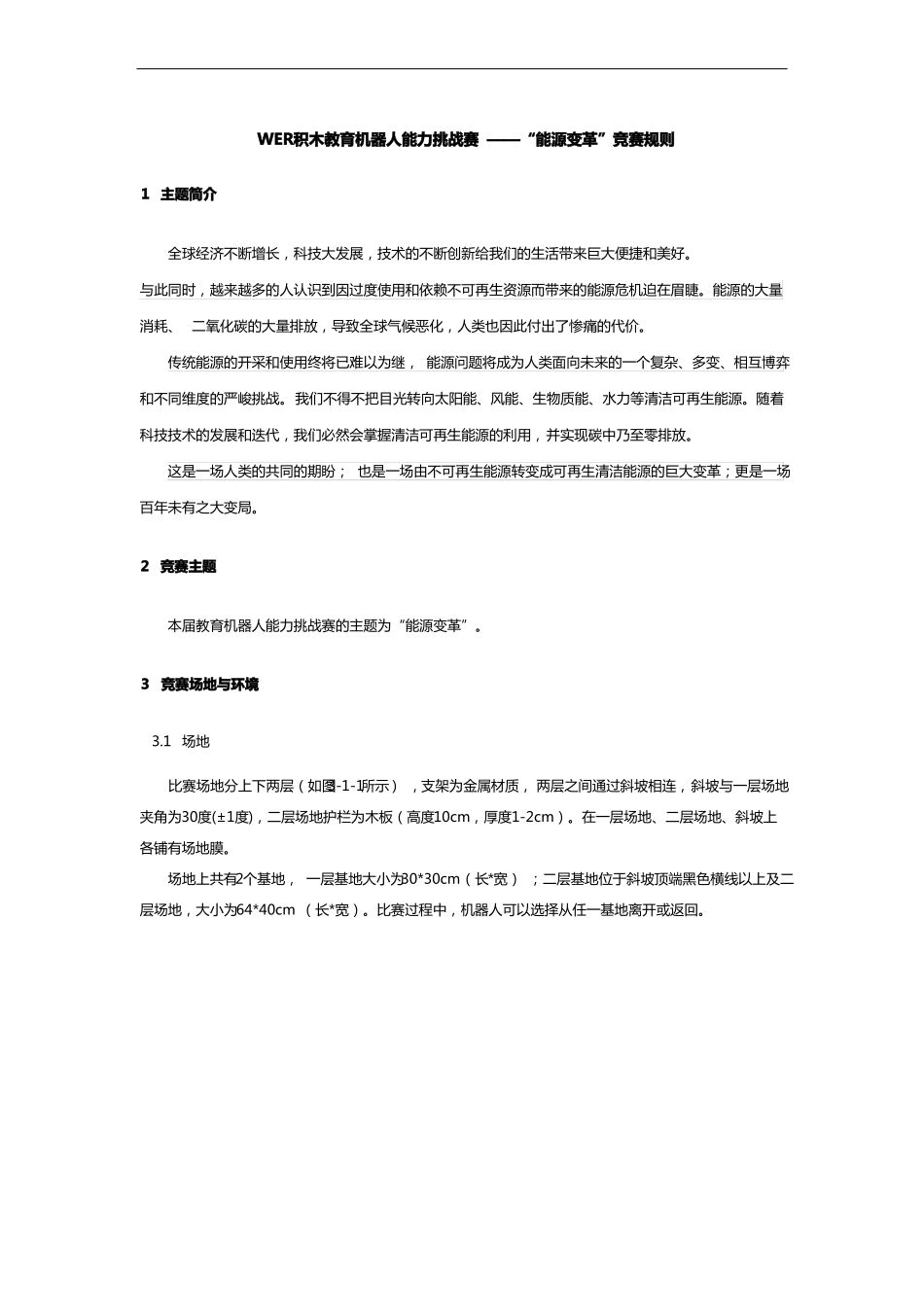
1场地比赛场地分上下两层(如图3-1-1所示),支架为金属材质,两层之间通过斜坡相连,斜坡与一层场地夹角为30度(±1度),二层场地护栏为木板(高度10cm,厚度1-2cm)
在一层场地、二层场地、斜坡上各铺有场地膜
场地上共有2个基地,一层基地大小为30*30cm(长*宽);二层基地位于斜坡顶端黑色横线以上及二层场地,大小为64*40cm(长*宽)
比赛过程中,机器人可以选择从任一基地离开或返回
二层“基地”二层:204*116cm一层:240*210cm一层“基地”图3-1-1比赛场地示意图(以实际比赛为准)3
2赛场环境机器人比赛场地环境为冷光源、低照度、无磁场干扰
但由于一般赛场环境的不确定因素较多,例如,场地表面可能有纹路和不平整,边框上有裂缝,光照条件有变化等等
参赛队在设计机器人时应考虑各种应对措施
4竞赛任务与得分比赛任务分预设任务和现场任务
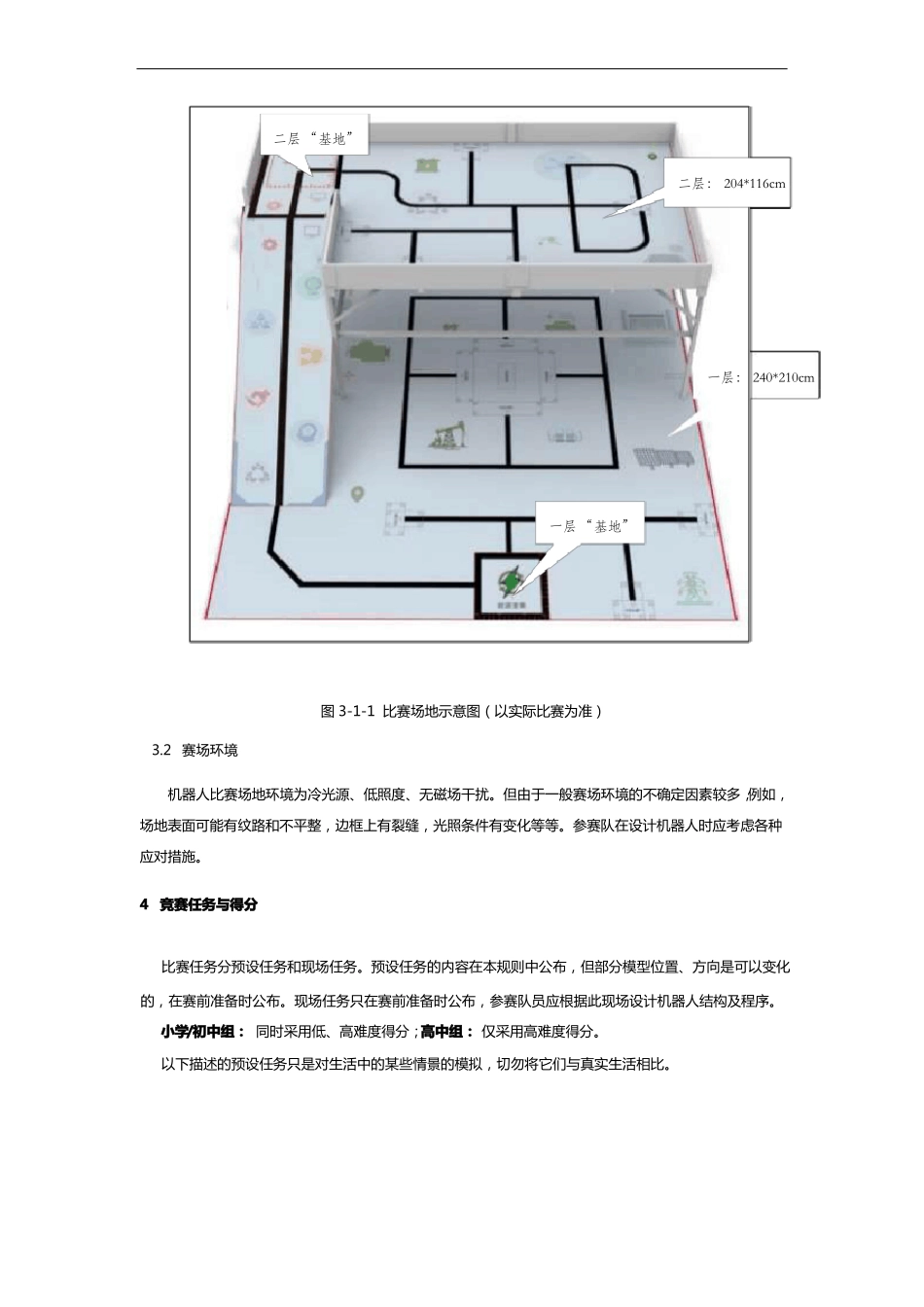
预设任务的内容在本规则中公布,但部分模型位置、方向是可以变化的,在赛前准备时公布