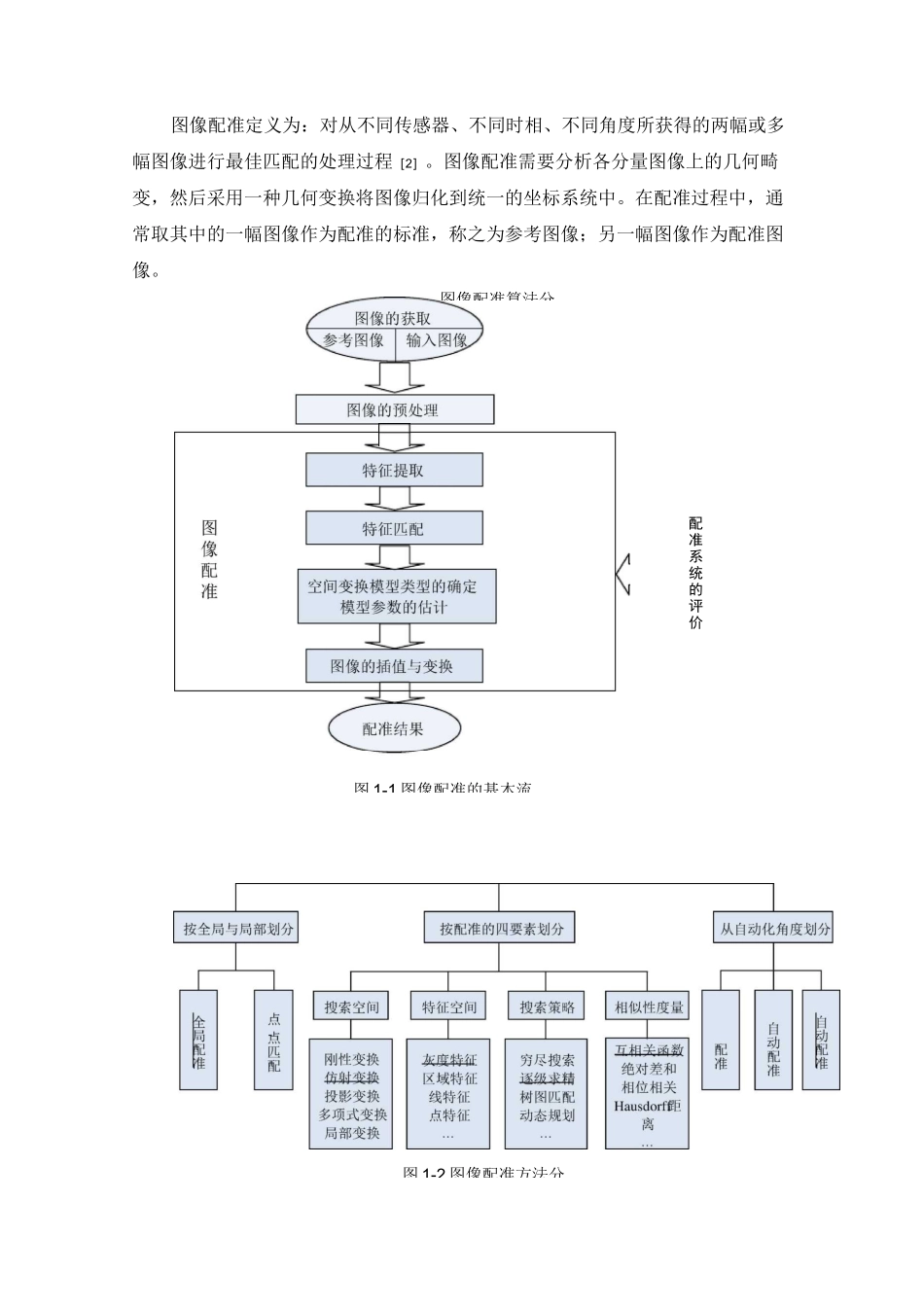
配准系统的评价图像配准定义为:对从不同传感器、不同时相、不同角度所获得的两幅或多幅图像进行最佳匹配的处理过程[2]
图像配准需要分析各分量图像上的几何畸变,然后采用一种几何变换将图像归化到统一的坐标系统中
在配准过程中,通常取其中的一幅图像作为配准的标准,称之为参考图像;另一幅图像作为配准图像
图1-1图像配准的基本流图像配准算法分图1-2图像配准方法分根据配准使用的特征,图像配准的方法大致可分为三类:(1)基于图像灰度的配准算法
首先从参考图像中提取目标区作为配准的模板,然后用该模板在待配准图像中滑动,通过相似性度量(如相关系数法、差的平方和法、差的绝对值法、协方差法)来寻找最佳匹配点
(2)基于图像特征的配准算法
该算法是以图像中某些显著特征(点、线、区域)为配准基元,算法过程分为两步:特征提取和特征匹配
首先从两幅图像中提取灰度变化明显的点、线、区域等特征形成特征集
然后在两幅图像对应的特征集中利用特征匹配算法尽可能地将存在对应关系的特征对选择出来
对于非特征像素点利用插值等方法作处理推算出对应匹配关系,从而实现两幅图像之间逐像素的配准
(3)基于对图像的理解和解释的配准算法
这种配准算法不仅能自动识别相应像点,而且还可以由计算机自动识别各种目标的性质和相互关系,具有极高的可靠性和精度
这种基于理解和解释的图像配准涉及到诸如计算机视觉、模式识别、人工智能等许多领域
不仅依赖于这些领域中理论上的突破,而且有待于高速度并行处理计算机的研制
从自动化角度来看,可以将配准过程分为自动、半自动和手动配准
存在问题:如何提高图像的配准速度将是大范围遥感图像自动配准问题的要点;选取何种自动配准方案以保证图像的配准精度将是大范围遥感图像自动配准问题的另一要点
f2(x,y扌g[f1((,y其中,h表示二维空间坐标变换
g表示灰度或辐射变换,描述因传感器类型的不同以及成像时气候等环境的