基于Simulink的车辆行驶控制系统建模与仿真汽车行驶控制系统是应用非常广泛的控制系统之一,其主要的目的是对汽车的速度进行合理的控制
系统的工作原理如下:通过速度操纵机构的位置发生改变以设置汽车的速度,再测量汽车当前的速度,并求取它与指定速度的差值,最后由速度差值信号驱动汽车产生相应的牵引力,并由此牵引力改变汽车的速度直到其速度稳定在指定的速度为止
本文采用Simulink建模,对行驶控制系统进行仿真,并采用Simulink自带的signalconstraint模块对PID参数进行优化,仿真结果表明,该系统能在短时间内平稳的达到指定的速度,提高了汽车的操纵性
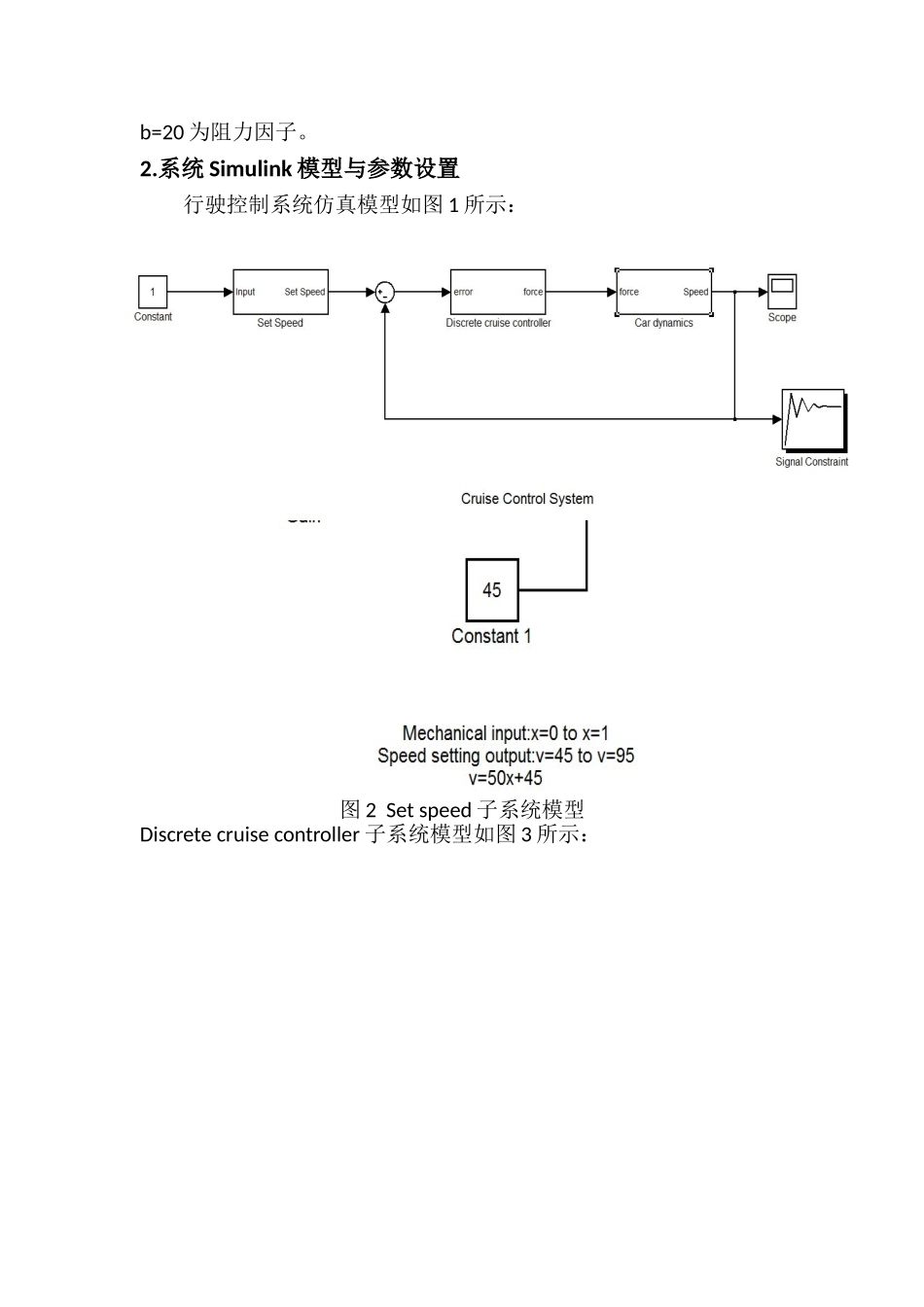
汽车行驶控制系统的物理模型与数学描述1)速度操纵机构的位置变换器位置变换器是汽车行驶控制系统的输入部分,其目的是将速度操纵机构的位置转换为相应的速度,二者之间的数学关系如下所示:其中x速度操纵机构的位置,v为与之相应的速度
2)离散行驶控制器行驶控制器是整个汽车行驶控制系统的核心部分
简单来说,其功能是根据汽车当前的速度与指定速度的差值,产生相应的牵引力
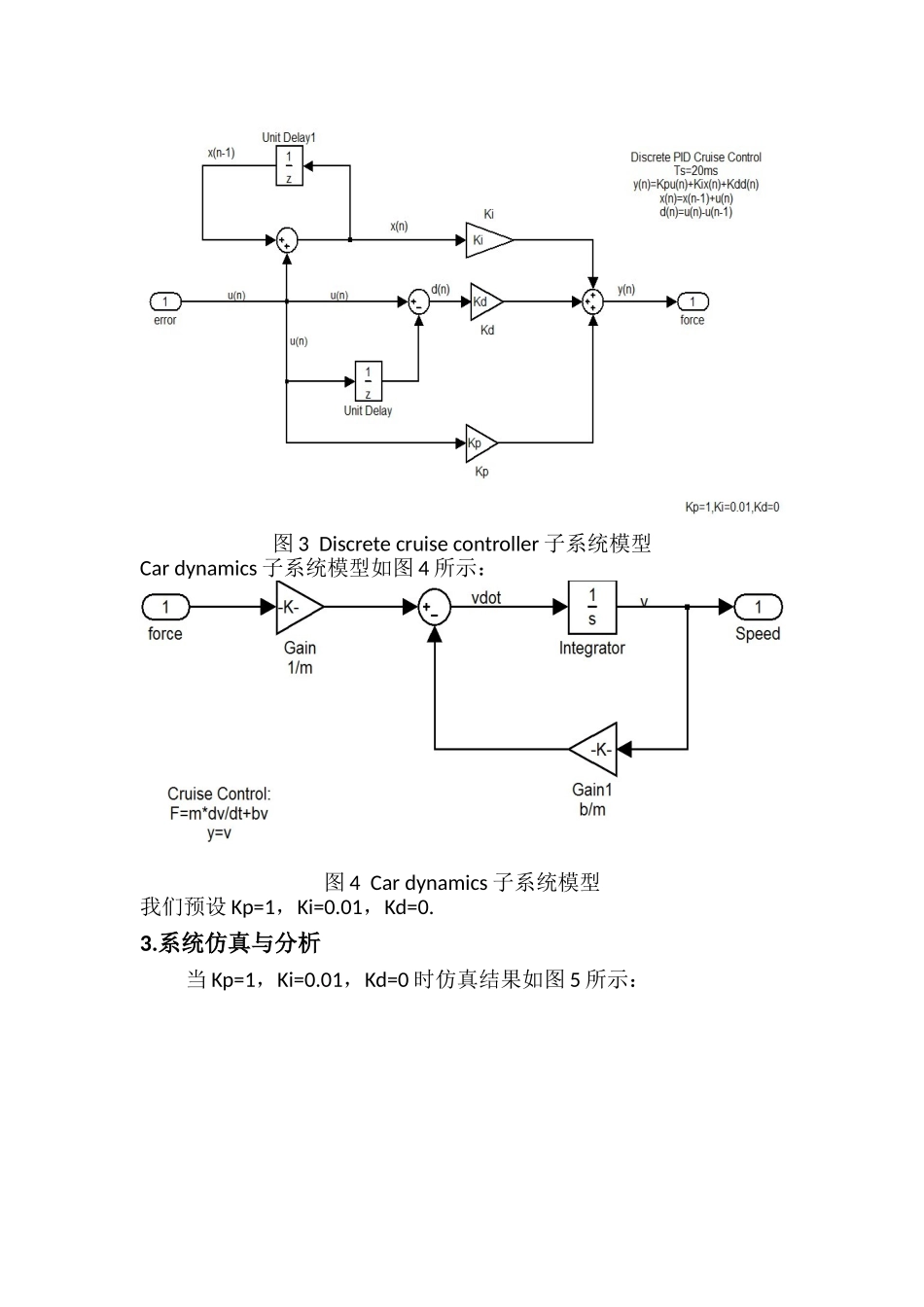
行驶控制器为一典型的PID控制器,其数学描述为:积分环节:微分环节:系统输出:其中u(n)为系统的输入,相当于汽车当前速度与指定速度的差值
y(n)为系统输出,相当于汽车牵引力,x(n)为系统的状态
Kp,Ki,Kd为PID控制器的比例、积分与微分控制参数
3)汽车动力机构汽车动力机构是行驶控制系统的执行机构
其功能是在牵引力的作用下改变汽车的速度,使其达到指定的速度
牵引力与速度之间的关系为:其中v为汽车的速度,F为汽车的牵引力,m=1000kg为汽车的质量,b=20为阻力因子
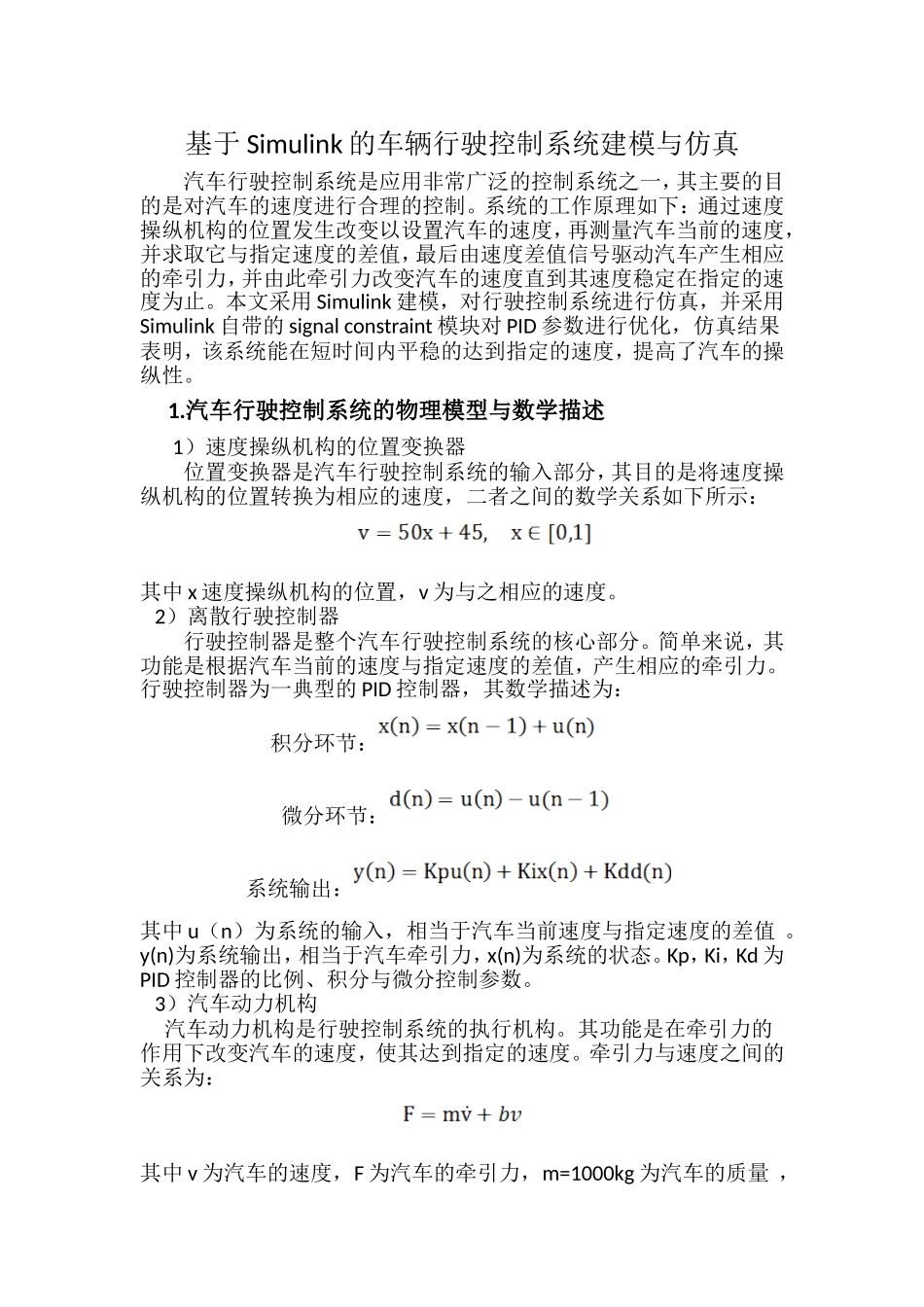
系统Simulink模型与参数设置行驶控制系统仿真模型如图1所示:图1行驶控制系统仿真模型Setspeed子系统模型如图2所示:图2Setspeed子系统模型Discretecru