基于STM32的机械臂运动控制与结构设计开题报告班级(学号):机械1104(2011010093)姓名:文伟松指导教师:王科社选题背景机器人技术是一种新兴技术,它涉及多种学科,综合了计算机、机械学、信号处理和传感技术、控制论、仿生学和人工智能等多学科
机器人按照用途可分为工业机器人、服务机器人和特种机器人,其中工业机器人是目前应用最多、技术上发展最成熟的一种机器人
随着我国经济的快速发展和科学技术的突飞猛进,使得机器人在货物搬运与物流、喷涂、焊接、测量等行业有着相当广泛的应用
码垛机器人是实现物流和包装自动化的关键装备,可以实现高速、自动、连续、准确的码垛操任务
人工码垛是强度大、重复性高的劳动,特别是高粉尘、有毒、有害等物料,基本不适合人工码垛,因此有必要研发一种码垛机器人,减低生产过程中对工人身心伤害
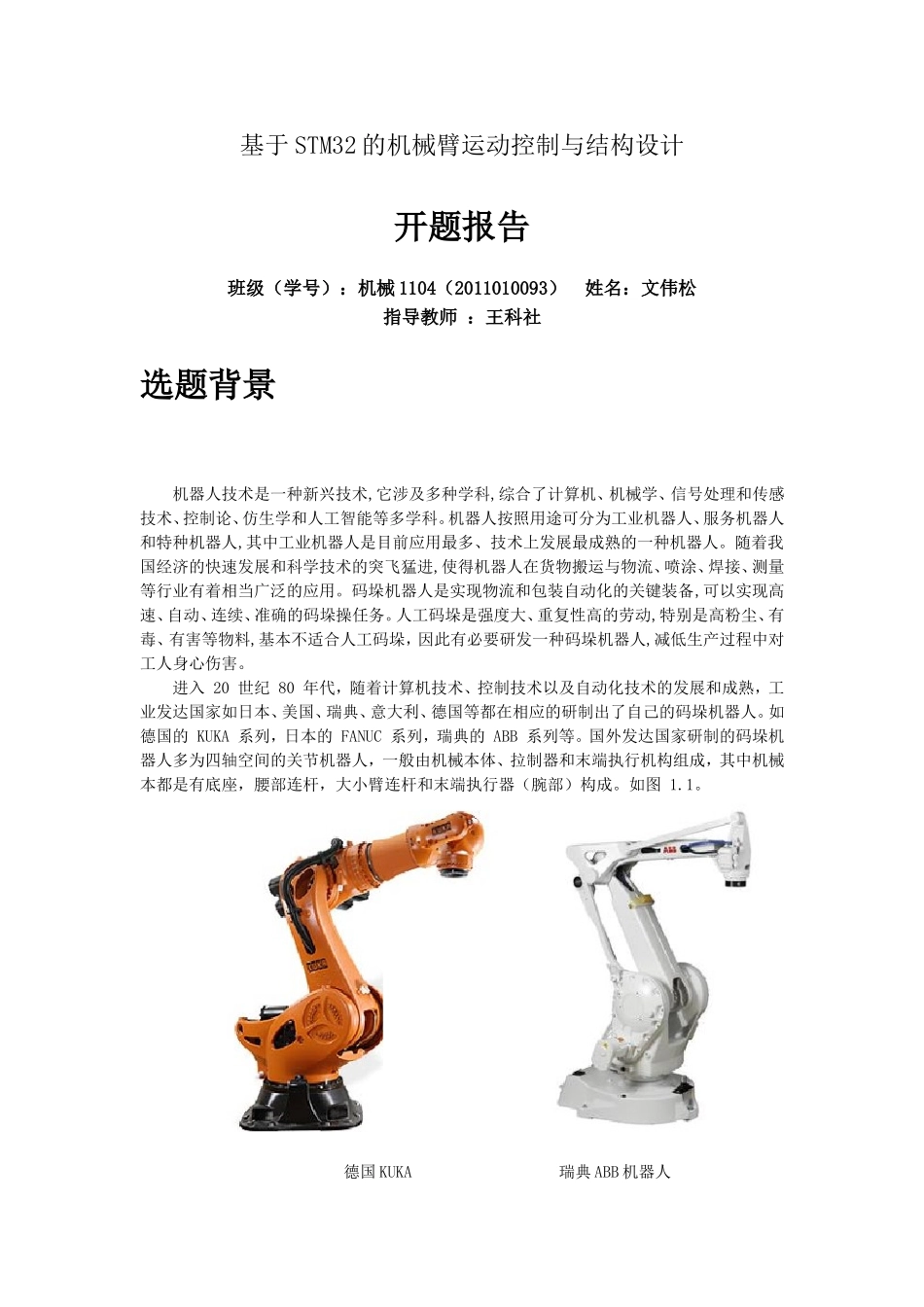
进入20世纪80年代,随着计算机技术、控制技术以及自动化技术的发展和成熟,工业发达国家如日本、美国、瑞典、意大利、德国等都在相应的研制出了自己的码垛机器人
如德国的KUKA系列,日本的FANUC系列,瑞典的ABB系列等
国外发达国家研制的码垛机器人多为四轴空间的关节机器人,一般由机械本体、拉制器和末端执行机构组成,其中机械本都是有底座,腰部连杆,大小臂连杆和末端执行器(腕部)构成
德国KUKA瑞典ABB机器人日本不二(FUJI)日本OKURA图1
1发达国家研制的主要工业机器人基于串联式码垛机器人,本文设计一种类似结构的机械臂
针对毕业论文题目“基于STM32的机械臂运动控制与结构设计”,首先对国内外高校,研究院,企业等对码垛机器人研究及其发展状况进行调研;其次对设计的机械臂作运动学分析以及控制系统设计等
1主要研究内容本文针对串联关节型码垛机器人,设计了一种新型4DOF机械臂;此机械臂主要连杆机构与串联关节型码垛机器人类似;在不大幅度增加系统转动惯量