第18课学生机器人跳舞[教学目的与要求]1
认识伺服电机,了解伺服电机的组成结构
了解伺服电机的工作原理
学会编写控制伺服电机的程序
以学生自主探究、合作学习为主,逐步培养学生的创造性思维能力、探索精神
让学生在解决问题的过程中体会成功的快乐
利用所学的机器人知识解决现实生活中的应用问题
[课时安排]建议安排1课时
[教学重点与难点]1
重点:学会编写控制伺服电机的程序
难点:计数循环控件的设置,学会编写控制伺服电机的程序
[教材分析与教法建议]1.教材的地位与作用本课的重点是学习机器人的伺服电机的转角设置
可以先让学生观察伺服电机的物理结构,让学生了解伺服电机的工作原理,并比较与直流电机有什么不同之处
本课介绍了计数循环控件,教师要向学生讲解计数循环控件的作用,并提醒学生注意它有两个图标,中间的程序会按照计数循环控件设置的次数重复执行
伺服电机是按照角度进行旋转的,最大的值为180度
在新授内容之后,可以安排学生将前面所学的直流电机知识结合起来,让学生编写边行走边跳舞的机器人程序
2.教学方法指导本课可以采用自主学习探究法、任务驱动法,强调学生的合作学习
[参考资料]伺服电机是一种能根据指令到达特定位置的专用电机
伺服电机由一个直流电机、一个齿轮减速单元、一个轴位置传感器和一套控制电机运转的电路组成
“伺服”一词本身是指系统自身调节其行为能力,也就是说,系统在响应控制信号时,能够检测自身位置并补偿外加的负载
伺服电机伺服电机主要用在定位控制方面,因此它们输出轴的行程往往限制在180°左右
伺服电机的输入信号是控制输出轴到达期望角位移的一串波形
伺服电路的功能是测量当前位置并确定它与期望位置的差异
如果有差异存在,伺服电路就会驱动伺服电机使输出轴达到期望位置
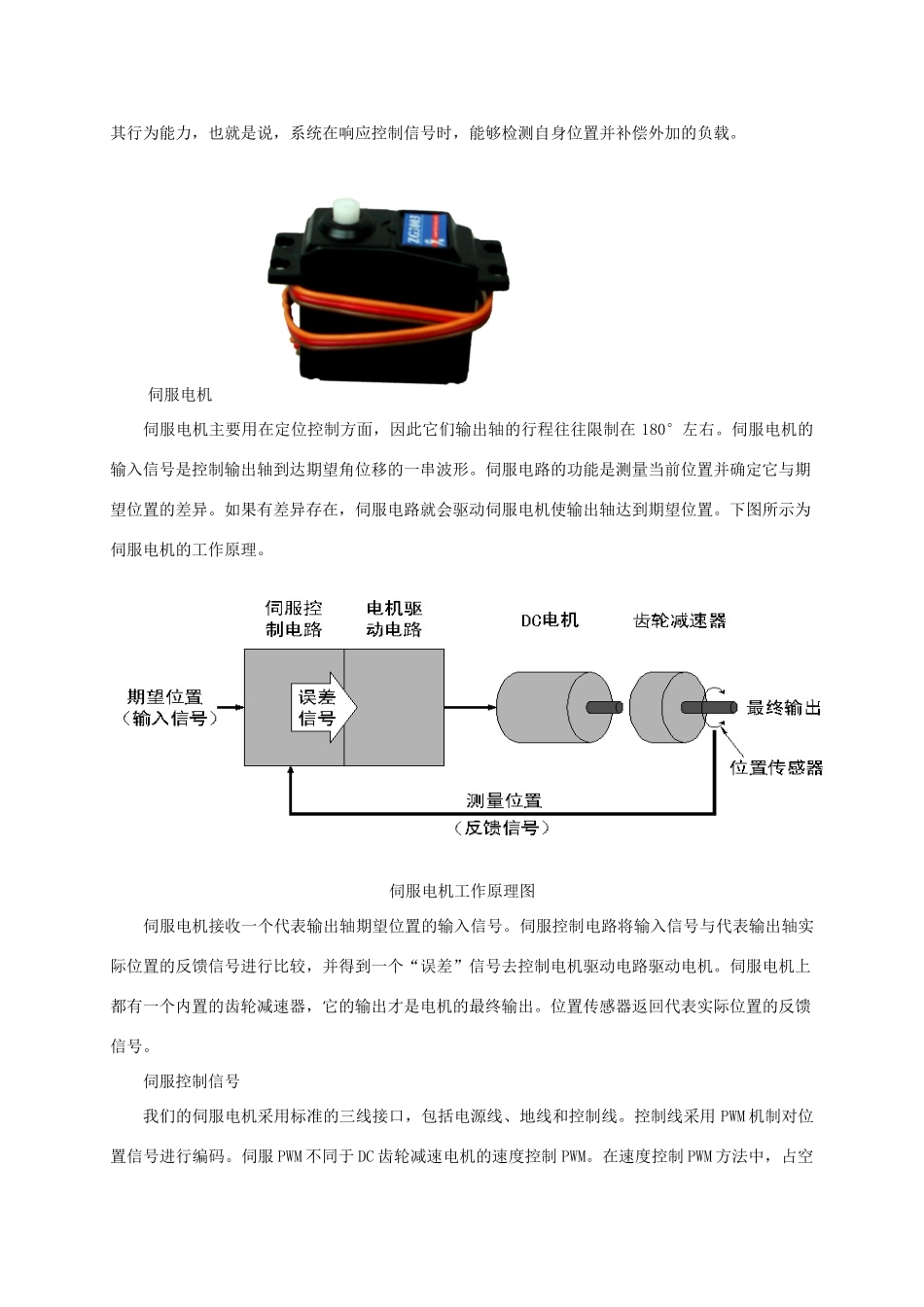
下图所示为伺服电机的工作原理
伺服电机工作原理图伺服电机接收一个代表输出轴期望位置的输入信号