基于matlabGUI的平面四杆机构的运动分析一、目的通过matlab对平面四杆机构进行运动仿真,并以GUI界面方式实现输入输出的参数化,对平面四杆机构进行位置分析、速度分析、加速度分析和静力学分析
此外,通过动画演示,更加形象直观地观察机构的运动过程
最后,将程序编译成
exe独立可执行文件,可以在其它没有安装matlab的机器上运行
二、设计思路通过matlab的GUI功能模块,创建一个图形用户界面,在自动生成的代码框架中对初始化函数和回调函数等进行编辑,建立与控件相关联的程序:控件属性、位置分析、速度分析、加速度分析、静力学分析、动画演示等
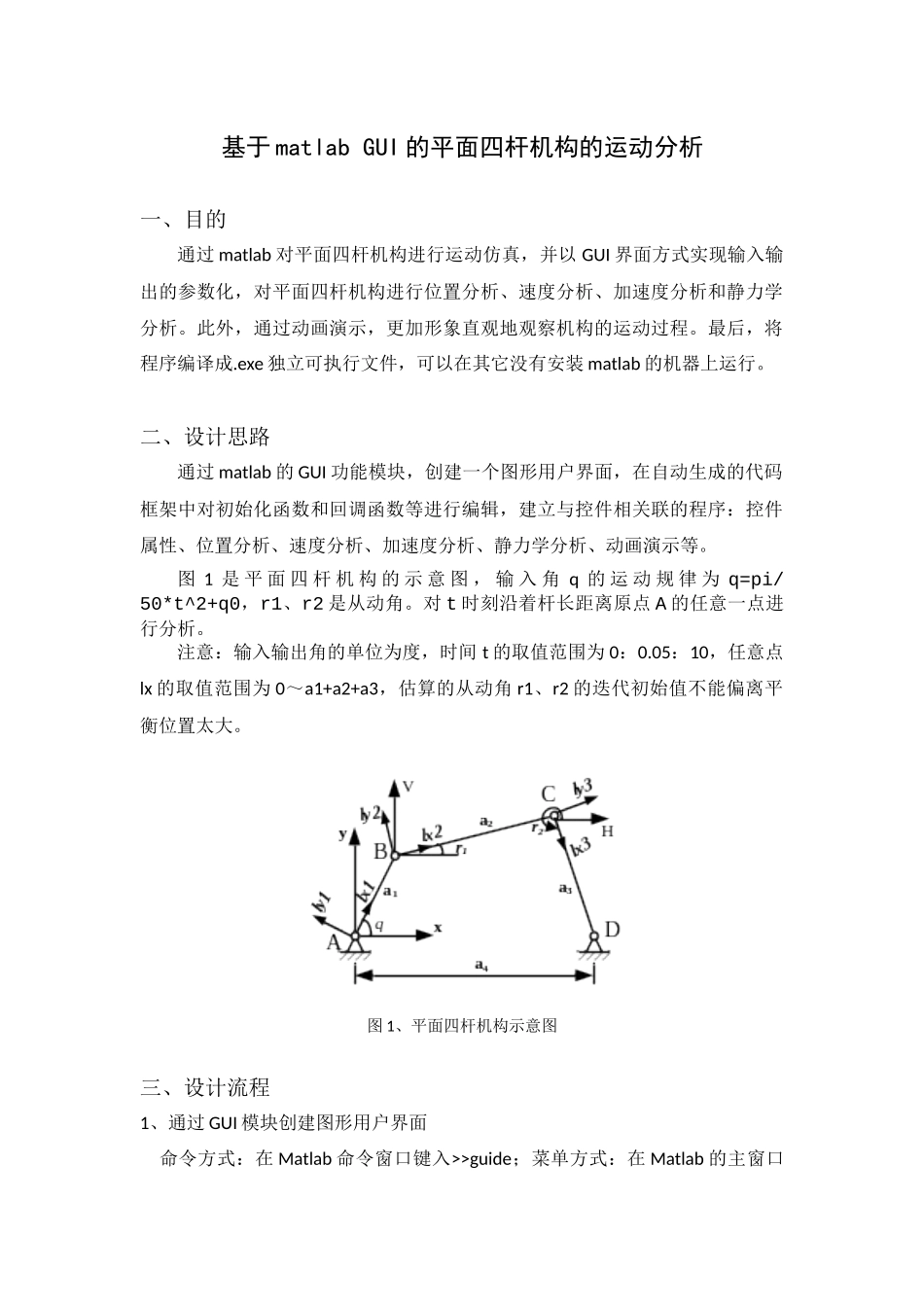
图1是平面四杆机构的示意图,输入角q的运动规律为q=pi/50*t^2+q0,r1、r2是从动角
对t时刻沿着杆长距离原点A的任意一点进行分析
注意:输入输出角的单位为度,时间t的取值范围为0:0
05:10,任意点lx的取值范围为0~a1+a2+a3,估算的从动角r1、r2的迭代初始值不能偏离平衡位置太大
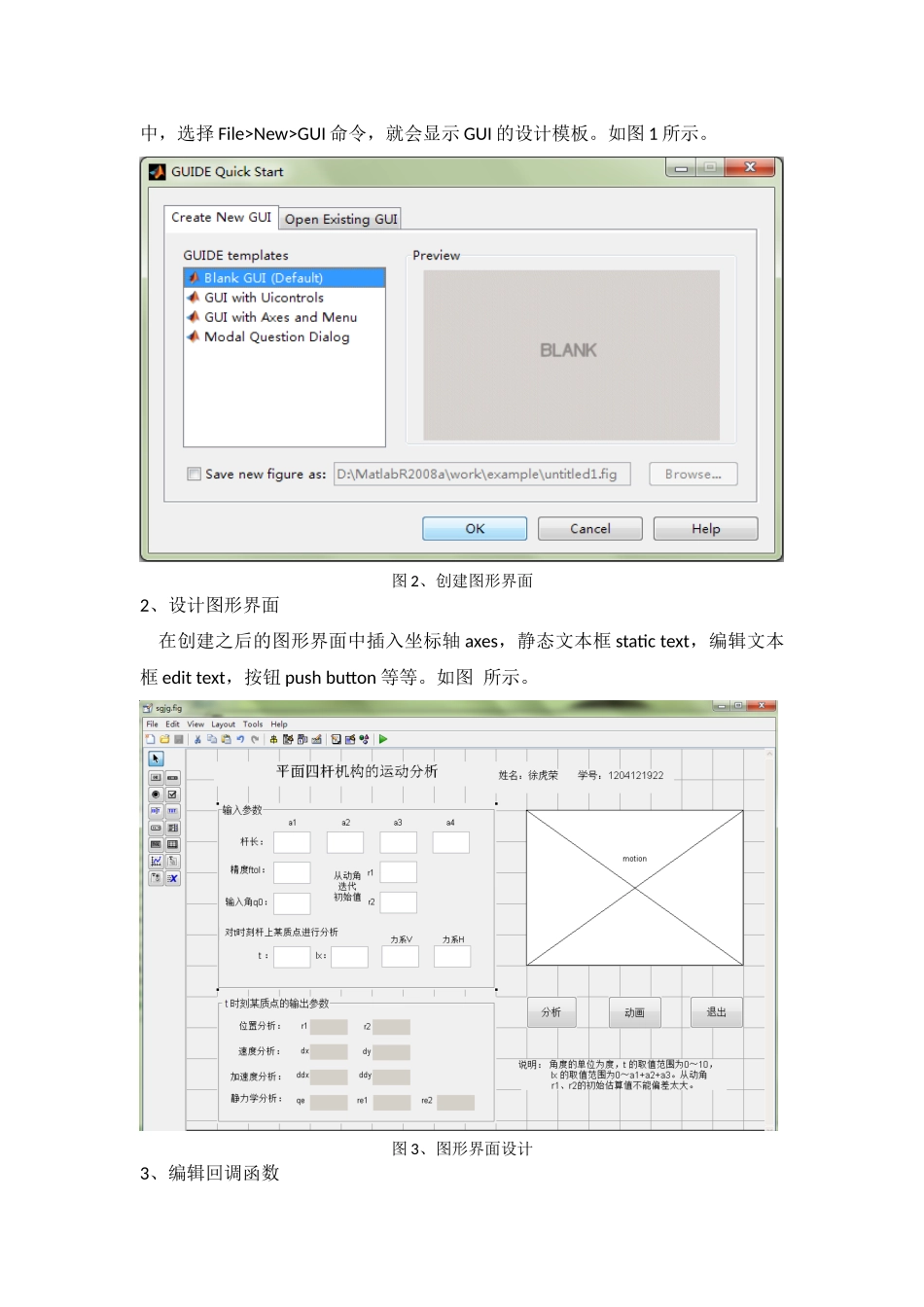
图1、平面四杆机构示意图三、设计流程1、通过GUI模块创建图形用户界面命令方式:在Matlab命令窗口键入>>guide;菜单方式:在Matlab的主窗口中,选择File>New>GUI命令,就会显示GUI的设计模板
图2、创建图形界面2、设计图形界面在创建之后的图形界面中插入坐标轴axes,静态文本框statictext,编辑文本框edittext,按钮pushbutton等等
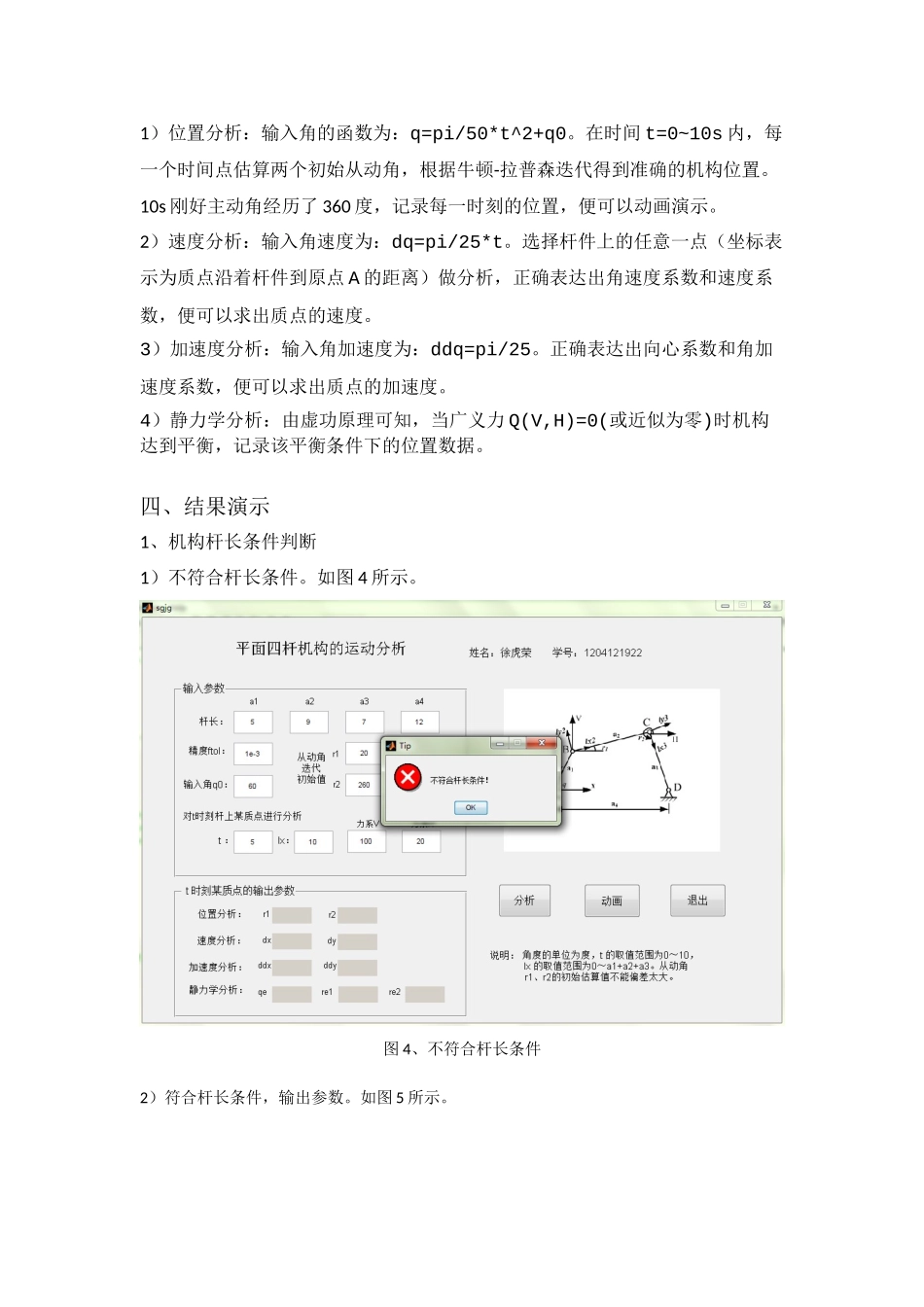
图3、图形界面设计3、编辑回调函数1)位置分析:输入角的函数为:q=pi/50*t^2+q0
在时间t=0~10s内,每一个时间点估算两个初始从动角,根据牛顿-拉普森迭代得到准确的机构位置
10s刚好主动角经历了360度,记录每一时刻的位置,便可以动画演示
2)速度分析:输入角速度为:dq=pi/25*t
选择杆件上的任意一点(